Simulating a PID controller on a quadcopter with random system noise.
Assumes that the thrust(motor) is directly proportional to the pwm values.
Calculating angular displacement: angular_acceleration = torque/moment_inertia
Double integrate the above term to get angular displacement and voila?
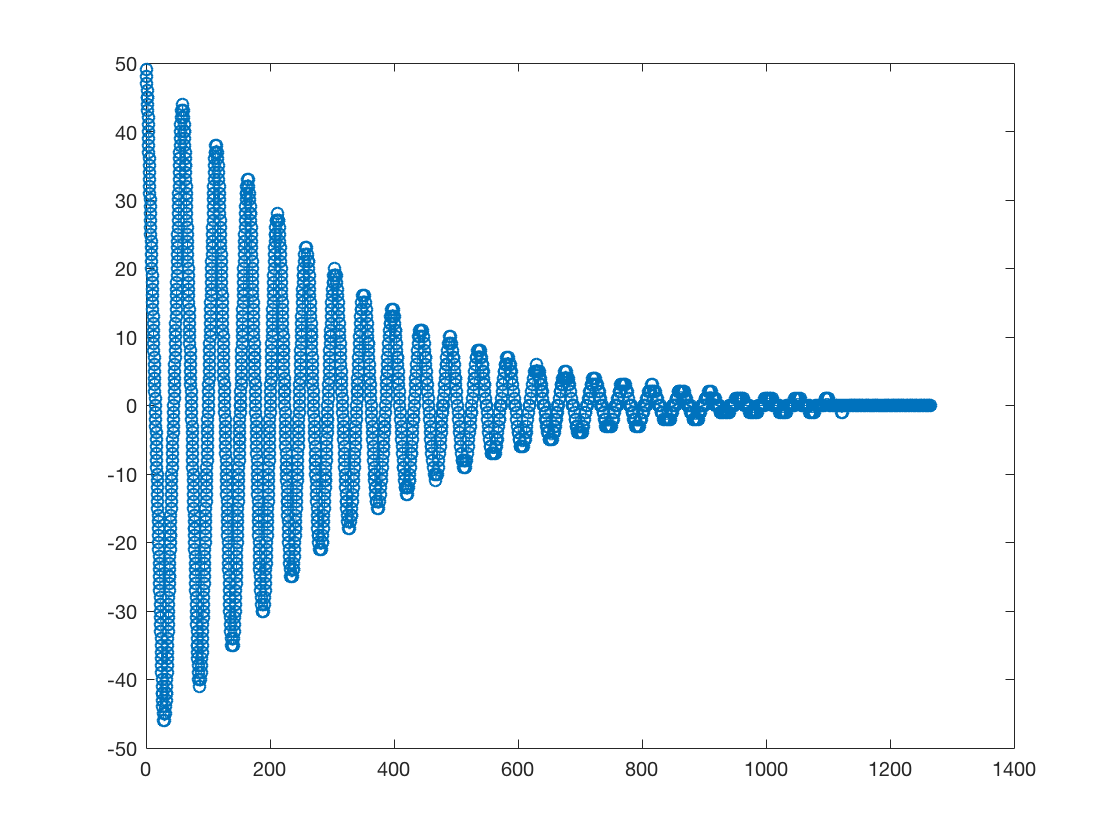
Roll with respect to time graph using PID controller: