- 被控对象:需要控制的对象,案例中指小球
- 目标值:期望被控对象达到的状态量,案例中指目标位置的坐标
- 反馈值:被控对象当前时刻的状态量,案例中指小球的实时位置坐标
- 输出量:PID的计算结果,案例中指控制力
- 误差:目标值-反馈值
- 稳态误差:系统稳定状态下仍存在的误差,如案例中加入干扰恒力后小球静止时仍存在的误差
- 阶跃输入:在稳定状态下目标值发生突然变化(上图目标值在0时刻由0跃升到虚线位置)
- 阶跃响应:阶跃输入后被控对象的跟随状态,能够代表系统的控制性能(上图彩色线条)
- 响应速度:阶跃输入后被控对象再次到达目标值的速度
- 超调量:阶跃输入后,被控对象到达目标值后超出目标值的距离
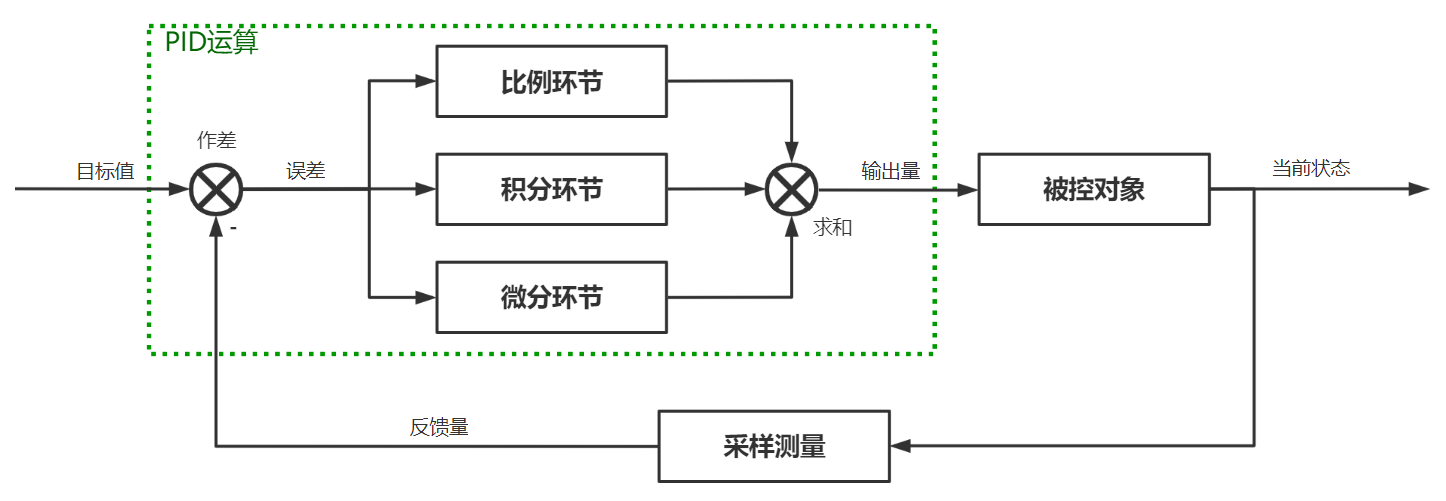
上图就是PID的信号框图,表示了PID的运行过程:
- 为系统指定一个目标值
- PID将目标值与被控对象当前的反馈量作差得到误差
- PID将误差值分别经过三个环节计算得到输出分量,三个分量加起来得到PID的输出
- 将PID的输出施加到被控对象上,使反馈量向目标值靠拢
由控制小球案例我们可以总结出PID三个环节各自的主要作用和效应:
- 比例环节:起主要控制作用,使反馈量向目标值靠拢,但可能导致振荡
- 积分环节:消除稳态误差,但会增加超调量
- 微分环节:产生阻尼效果,抑制振荡和超调,但会降低响应速度
我们在设计PID时主要关注三个量:目标值、反馈值、输出值,PID会根据目标值和反馈值计算输出值。
需要强调的是,PID的整个计算过程其实与被控对象是什么完全没有关系,它只是负责进行数值计算,而我们——作为控制系统的设计者,就需要为PID指定这三个量所对应的实际物理量,这在不同的控制系统中是不一样的。
那么如何确定实际物理量呢,我为大家总结了一个常用准则:
- 目标值和反馈值通常为同种物理量,就是你需要控制的物理量
- 输出值通常是直接驱动被控对象的控制量
- 输出量作用在被控对象上需要经过时间积累才会产生反馈量的变化,换言之输出值通常为反馈值对于时间的低阶物理量。比如:目标/反馈值为位置,则输出值可以为速度或加速度
- 对于线性关系的两个物理量(只差一个系数),可以直接替换。比如:目标/反馈值为位置,输出值可以为加速度,但我们无法直接控制加速度而是控制驱动力大小,由于驱动力与加速度只差一个系数(F=ma),因此可以将输出值直接定为驱动力
任务:对电机转速进行控制
可用条件:已知电机的实时转速,并且可控制电机中流过的电流大小
PID目标值:需要电机达到的转速
PID反馈值:电机的实时转速
PID输出值:电机中流过的电流大小
分析:电机中流过的电流大小近似正比于电机的扭矩,也就近似正比于电机角加速度的大小,是转速的低阶物理量,因此可以用电流大小作为输出值