-
Notifications
You must be signed in to change notification settings - Fork 4
/
Copy pathREADME.md~
17 lines (8 loc) · 904 Bytes
/
README.md~
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
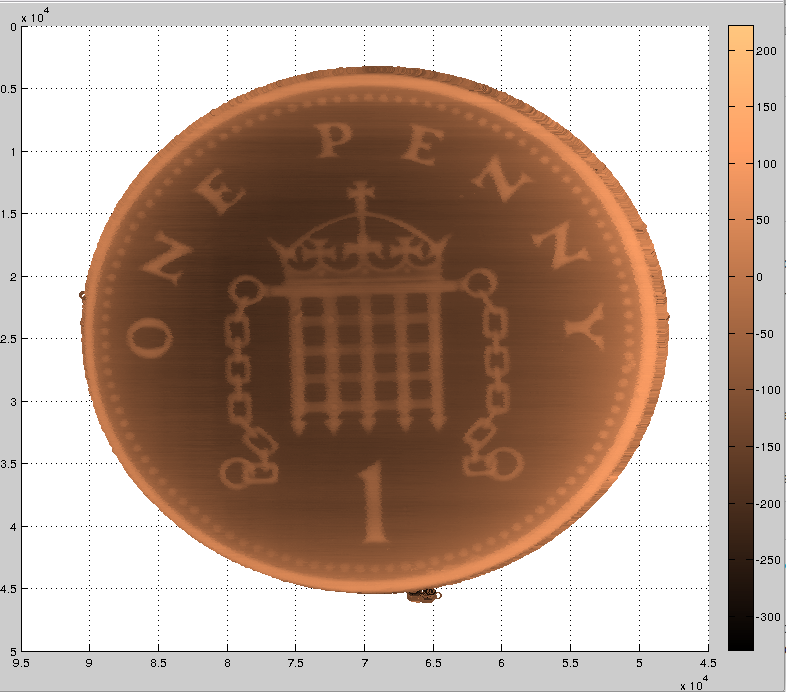
Laser-Profilometer
==================
Code for a stm32f4 microcontroller (dev board) to control an XY stage and interact with Keyence LT-9010 laser profilometer to create 3D scans of surfaces.
Uses the C++ framework xpcc (see https://github.com/roboterclubaachen/xpcc for code and license). A copy is included because a modified UartHandler is used.
Uses cascaded PID controller to control DC brushed motors equipped with optical rotary encoders.
A GUI using QT 5.2 can display the current position and measurement. A command line program can be used to manually control the stage and define vertices for a rectangular area.