diff --git a/doc/images/nxo_base-coordinate-sys.png b/doc/images/nxo_base-coordinate-sys.png
new file mode 100644
index 00000000..57b2e2a6
Binary files /dev/null and b/doc/images/nxo_base-coordinate-sys.png differ
diff --git a/doc/images/nxo_frame-coodinate-sys.png b/doc/images/nxo_frame-coodinate-sys.png
new file mode 100644
index 00000000..b03d768d
Binary files /dev/null and b/doc/images/nxo_frame-coodinate-sys.png differ
diff --git a/doc/images/nxo_gazebo_ar-marker_cafe-table.png b/doc/images/nxo_gazebo_ar-marker_cafe-table.png
new file mode 100644
index 00000000..65de616a
Binary files /dev/null and b/doc/images/nxo_gazebo_ar-marker_cafe-table.png differ
diff --git a/doc/images/nxo_gazebo_moving_cafe_table.png b/doc/images/nxo_gazebo_moving_cafe_table.png
new file mode 100644
index 00000000..340708e2
Binary files /dev/null and b/doc/images/nxo_gazebo_moving_cafe_table.png differ
diff --git a/doc/images/nxo_gazebo_r-hand-on-ar-marker.png b/doc/images/nxo_gazebo_r-hand-on-ar-marker.png
new file mode 100644
index 00000000..2f7f68da
Binary files /dev/null and b/doc/images/nxo_gazebo_r-hand-on-ar-marker.png differ
diff --git a/doc/images/nxo_moveit-planning_no-pillar.png b/doc/images/nxo_moveit-planning_no-pillar.png
new file mode 100644
index 00000000..f90c538b
Binary files /dev/null and b/doc/images/nxo_moveit-planning_no-pillar.png differ
diff --git a/doc/images/nxo_moveit-planning_pillar.png b/doc/images/nxo_moveit-planning_pillar.png
new file mode 100644
index 00000000..08b96b03
Binary files /dev/null and b/doc/images/nxo_moveit-planning_pillar.png differ
diff --git a/doc/images/nxo_moveit_allow-approximate-ik-solutions.png b/doc/images/nxo_moveit_allow-approximate-ik-solutions.png
new file mode 100644
index 00000000..fd299f23
Binary files /dev/null and b/doc/images/nxo_moveit_allow-approximate-ik-solutions.png differ
diff --git a/doc/images/nxo_moveit_ar_head-camera-l.png b/doc/images/nxo_moveit_ar_head-camera-l.png
new file mode 100644
index 00000000..200b763c
Binary files /dev/null and b/doc/images/nxo_moveit_ar_head-camera-l.png differ
diff --git a/doc/images/nxo_moveit_ar_head-camera-l_r-hand-on-ar-marker.png b/doc/images/nxo_moveit_ar_head-camera-l_r-hand-on-ar-marker.png
new file mode 100644
index 00000000..4e94ca39
Binary files /dev/null and b/doc/images/nxo_moveit_ar_head-camera-l_r-hand-on-ar-marker.png differ
diff --git a/doc/images/nxo_moveit_context_publish-current-scene.png b/doc/images/nxo_moveit_context_publish-current-scene.png
new file mode 100644
index 00000000..2ae11826
Binary files /dev/null and b/doc/images/nxo_moveit_context_publish-current-scene.png differ
diff --git a/doc/images/nxo_moveit_loop-animation_show-trail_pllar.png b/doc/images/nxo_moveit_loop-animation_show-trail_pllar.png
new file mode 100644
index 00000000..ea9b31d1
Binary files /dev/null and b/doc/images/nxo_moveit_loop-animation_show-trail_pllar.png differ
diff --git a/doc/images/nxo_moveit_panels_motionplanning-slider_halfpos.png b/doc/images/nxo_moveit_panels_motionplanning-slider_halfpos.png
new file mode 100644
index 00000000..98ace2b5
Binary files /dev/null and b/doc/images/nxo_moveit_panels_motionplanning-slider_halfpos.png differ
diff --git a/doc/images/nxo_moveit_plan-and-execute.png b/doc/images/nxo_moveit_plan-and-execute.png
new file mode 100644
index 00000000..9a10cc60
Binary files /dev/null and b/doc/images/nxo_moveit_plan-and-execute.png differ
diff --git a/doc/images/nxo_moveit_plan-and-execute_done.png b/doc/images/nxo_moveit_plan-and-execute_done.png
new file mode 100644
index 00000000..df8c402b
Binary files /dev/null and b/doc/images/nxo_moveit_plan-and-execute_done.png differ
diff --git a/doc/images/nxo_moveit_plan_show-trail-2_tsubo-dae.png b/doc/images/nxo_moveit_plan_show-trail-2_tsubo-dae.png
new file mode 100644
index 00000000..34ebf0ad
Binary files /dev/null and b/doc/images/nxo_moveit_plan_show-trail-2_tsubo-dae.png differ
diff --git a/doc/images/nxo_moveit_planning-group_left_arm.png b/doc/images/nxo_moveit_planning-group_left_arm.png
new file mode 100644
index 00000000..13650adf
Binary files /dev/null and b/doc/images/nxo_moveit_planning-group_left_arm.png differ
diff --git a/doc/images/nxo_moveit_scene-object_import-from-text.png b/doc/images/nxo_moveit_scene-object_import-from-text.png
new file mode 100644
index 00000000..1601e323
Binary files /dev/null and b/doc/images/nxo_moveit_scene-object_import-from-text.png differ
diff --git a/doc/images/nxo_moveit_scene-object_tsubo-dae_adjusting-pos.png b/doc/images/nxo_moveit_scene-object_tsubo-dae_adjusting-pos.png
new file mode 100644
index 00000000..7a2aa9ee
Binary files /dev/null and b/doc/images/nxo_moveit_scene-object_tsubo-dae_adjusting-pos.png differ
diff --git a/doc/images/nxo_moveit_scene-object_tsubo-stl_adjusting-pos.png b/doc/images/nxo_moveit_scene-object_tsubo-stl_adjusting-pos.png
new file mode 100644
index 00000000..8544985f
Binary files /dev/null and b/doc/images/nxo_moveit_scene-object_tsubo-stl_adjusting-pos.png differ
diff --git a/doc/images/nxo_moveit_select-goal-random.png b/doc/images/nxo_moveit_select-goal-random.png
new file mode 100644
index 00000000..b2aef649
Binary files /dev/null and b/doc/images/nxo_moveit_select-goal-random.png differ
diff --git a/doc/images/nxo_moveit_use-collision-aware-ik_pillar.png b/doc/images/nxo_moveit_use-collision-aware-ik_pillar.png
new file mode 100644
index 00000000..4b0d8f31
Binary files /dev/null and b/doc/images/nxo_moveit_use-collision-aware-ik_pillar.png differ
diff --git a/doc/images/nxo_moveit_velocity-scalling.png b/doc/images/nxo_moveit_velocity-scalling.png
new file mode 100644
index 00000000..3f4687a0
Binary files /dev/null and b/doc/images/nxo_moveit_velocity-scalling.png differ
diff --git a/doc/images/nxo_rqt_joint-trajectory-controller_head_controller.png b/doc/images/nxo_rqt_joint-trajectory-controller_head_controller.png
new file mode 100644
index 00000000..47836d7a
Binary files /dev/null and b/doc/images/nxo_rqt_joint-trajectory-controller_head_controller.png differ
diff --git a/doc/images/nxo_rqt_plugin_joint-trajectory-controller.png b/doc/images/nxo_rqt_plugin_joint-trajectory-controller.png
new file mode 100644
index 00000000..1ffe598b
Binary files /dev/null and b/doc/images/nxo_rqt_plugin_joint-trajectory-controller.png differ
diff --git a/doc/manual_ja_development-pc-setup.md b/doc/manual_ja_development-pc-setup.md
new file mode 100644
index 00000000..9af31761
--- /dev/null
+++ b/doc/manual_ja_development-pc-setup.md
@@ -0,0 +1,95 @@
+## 開発用ワークステーションのセットアップ
+
+### Debian バイナリパッケージからのインストール
+
+Debian バイナリパッケージからソフトウェアのインストールを行います.
+
+#### ROS および HIRO / NEXTAGE OPEN ソフトウェアのインストール
+
+ROS Indigo および HIRO,NEXTAGE OPEN のパッケージをインストールします.
+ターミナルを開いて次のコマンドを実行してください..
+
+```
+$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
+$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net --recv-key0xB01FA116
+$ sudo apt-get update && sudo apt-get install ros-indigo-rtmros-nextage ros-indigo-rtmros-hironx
+```
+
+インストールの最後に setup.bash を読み込み,ROS の環境を設定します.
+
+```
+$ source /opt/ros/indigo/setup.bash
+```
+
+これは新しくターミナルを立ち上げて ROS を使用する前に毎回必要になります.
+下記のように .bashrc ファイルに設定を加えて
+ターミナル起動時に setup.bash を自動で実行し ROS 環境になるようにしておくと便利です.
+
+```
+$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
+```
+
+- 注意: 上記コマンドの `>>` を `>` にしてしまうと元々あった .bashrc 内の設定が消えてしまうので気をつけてください.
+
+
+#### HIRO / NEXTAGE OPEN ソフトウェアのみのインストール
+
+ROS Indigo が既にインストールされていて HIRO / NEXTAGE OPEN のソフトウェアのみをインストールする必要がある場合は次の1行だけ実行してください.
+
+```
+$ sudo apt-get update && sudo apt-get install ros-indigo-rtmros-nextage ros-indigo-rtmros-hironx
+```
+
+### ネットワーク設定
+
+#### ホスト名の設定(オプション)
+
+デフォルトの HIRO / NEXTAGE OPEN のソフトウェアでは QNX コンピュータのホスト名を通信の際に使います.
+ホスト名の設定をオペレーティングシステム上で行っておくと便利です.
+
+- 次の行を `/etc/hosts` に追加
+```
+# For accessing QNX for NEXTAGE Open
+192.168.128.10 nextage
+```
+ - IP アドレスはユーザの環境により上記のものとは異なる場合があります.
+ - `ping` を打って nextage から返ってくることを確認してください.
+ - シミュレータを利用するために上記の設定を変更する必要はありません.
+ - `192.168.128.x` セグメントを使用するネットワークアプリケーションを使用している場合を除き,
+この設定はネットワークの使用には有害ではありません.
+
+- 既知の OpenRTM の問題 https://github.com/start-jsk/rtmros_hironx/issues/33 を回避するため
+ネットワーク接続に `eth0` が使用されていることを確認してください.
+
+
+### ワークスペースのセットアップ
+
+HIRO / NEXTAGE OPEN のプログラムコードを作成・ビルドする必要がない場合は
+本項目のインストール手順は不要です.
+
+下記のセットアップ手順ではワークスペース名を `catkin_ws` (catkin workspace) としていますが
+他の名前・フォルダ名でも大丈夫です.
+
+```
+$ mkdir -p ~/catkin_ws/src
+$ cd ~/catkin_ws
+$ wstool init src
+$ wstool merge -t src https://raw.githubusercontent.com/tork-a/rtmros_nextage/indigo-devel/hironxo.rosinstall
+$ wstool update -t src
+$ source /opt/ros/indigo/setup.bash
+$ rosdep update && rosdep install -r -y --from-paths src --ignore-src
+$ catkin build
+$ source devel/setup.bash
+```
+
+ターミナルを開くたびに `source ~/catkin_ws/devel/setup.bash`
+を実行したくない場合は .bashrc に設定します.
+
+```
+$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
+```
+
+- 注意: 上記コマンドの `>>` を `>` にしてしまうと元々あった .bashrc 内の設定が消えてしまうので気をつけてください.
+
+
+
diff --git a/doc/manual_ja_reference.md b/doc/manual_ja_reference.md
new file mode 100644
index 00000000..34dada21
--- /dev/null
+++ b/doc/manual_ja_reference.md
@@ -0,0 +1,240 @@
+
+# ロボットハードウェアの概要
+
+## ロボット諸元
+
+詳しくはカワダロボティクスのサイト内にある NEXTAGE 製品使用を参照してください.
+
+- Kawada Robotics NEXTAGE - 製品仕様
+ - メーカサイト
+ - http://nextage.kawada.jp/
+ - 自由度: 15軸
+ - 腕6軸 x 2 : 肩 Yaw-Pitch,肘 Pitch,手首 Pitch-Roll
+ - 首2軸 : 首 Yaw-Pitch
+ - 腰1軸 : 腰 Yaw
+ - 各関節動作仕様
+ - 角度: http://nextage.kawada.jp/specification/#specDousaTable
+ - 速度: http://nextage.kawada.jp/specification/#specHontaiTable
+ - 最大可搬質量
+ - 片腕 : 1.5 kg
+ - 両腕 : 3.0 kg
+ - カメラ
+ - 頭部 x 2
+ - ハンドカメラ(オプション)
+
+## 座標系
+
+HIRO / NEXTAGE OPEN の座標系は下の図のようになっています.
+
+ベース座標は腰基部中心に設定されています.
+
+- ベース座標
+ - X軸: 正 - 前方 / 負 - 後方
+ - Y軸: 正 - 左側 / 負 - 右側
+ - Z軸: 正 - 上方 / 負 - 下方
+
+
+各フレームの座標系は次のようになっています.
+
+- 各座標軸と色表記
+ - X軸: Red
+ - Y軸: Green
+ - Z軸: Blue
+
+
+
+# コンピュータとソフトウェアの概要
+
+### 制御用コンピュータ
+
+カワダロボティクスの HIRO および NEXTAGE OPEN ロボットシステムには次の2つのコンピュータがあります.
+
+- コントロールボックス(QNXコンピュータ)
+ - ロボットを制御するコンピュータ
+ - QNX: 実時間オペレーティングシステム
+ - デフォルトではソフトウェアのインストール・改変は不可
+ - 保守・アップデートは可能
+- UIコントロールボックス(Ubuntuコンピュータ/ビジョンPC)
+ - 作業を行うコンピュータ
+ - Ubuntu
+ - 高次レイヤソフトウェアの実行
+
+### 開発用コンピュータ
+
+HIRO および NEXTAGE OPEN のシステムでは2台の制御用コンピュータの他に
+開発用コンピュータも使用することができます.
+
+- 開発用コンピュータ要求仕様
+ - Intel i5 以上のプロセッサ
+ - 4GB 以上のメモリ
+ - 15GB 以上のディスク空き容量
+ - Ubuntu 14.04
+ - ROS Indigo
+ - QNXコンピュータにイーサネット経由で接続(ロボット所有者のみ)
+
+## ソフトウェアの概要
+
+下に HIRO / NEXTAGE OPEN の QNX と Ubuntu のソフトウェアコンポーネント構成図を示します.
+ユーザーは ROS と RTM(hrpsys) のどちらを利用してもロボットを制御するソフトウェアをプログラムすることができます.
+
+
+
+
+## API の概要
+
+HIRO / NEXTAGE OPEN で使用する API をシステムの観点で大別すると RTM と ROS の2種があり,
+ROS API でも ROS インタフェース と MoveIt! インタフェースに分けることができます.
+
+- RTM API on hrpsys
+- ROS API
+ - ROS インタフェース
+ - MoveIt! インタフェース
+
+それぞれの API が Python や C++ などのプログラミング言語で利用することができます.
+
+下図にそれら API の構成図を示します.
+
+
+
+
+
+### 各 API の利用法
+
+各 API の利用法や使い分けについては次を参考にしてください.
+
+- RTM ベースのインタフェースの方が実装されている機能が多い
+ - HIRONX ロボットが元々 OpenRTM 上で動作しており,それに対して RTM プロセスと ROS で書かれたプログラムを繋ぐ hrpsys_ros_bridge を作った経緯のため
+- キャリブレーションやサーボの ON/OFF などの基本的な操作は RTM インタフェースを使用
+- 全ての API は同一プログラム言語で書かれた1つのプログラムファイル内で混成利用可能
+
+
+# 保守・管理
+
+## Ubuntuソフトウェアのアップデート
+
+Ubuntu 上の全てのソフトウェアをアップデートする場合は次のコマンドを実行してください.
+
+```
+$ sudo apt-get update && sudo apt-get dist-upgrade
+```
+
+HIRO / NEXTAGE OPEN のソフトウェアのみをアップデートする場合は次のコマンドを実行してください.
+
+```
+$ sudo apt-get update && sudo apt-get ros-indigo-rtmros-nextage ros-indigo-rtmros-hironx
+```
+
+## QNX での作業
+
+### QNX GUIツール - NextageOpenSupervisor
+
+QNX に関する日常的な作業のうち次のものは
+カワダロボティクスから提供されている GUI ツール NextageOpenSupervisor を用いて操作することができます.
+
+- コントロールボックス(QNXコンピュータ)のシャットダウン処理
+- アップデート
+
+このツールは UIコンピュータ(Ubuntuコンピュータ/ビジョンPC)に
+nxouser アカウントでログオンするとデスクトップ上にアイコンがあります.
+
+### QNXのコマンド操作
+
+本作業は QNX にログオンできることを前提としたものです.
+次のコマンドで QNX にSSH接続とログオンを行います.
+
+```
+YOURHOST$ ssh -l %QNX_YOUR_USER% %IPADDR_YOUR_QNX%
+```
+
+##### QNX シャットダウンコマンド
+
+```
+QNX$ su -c '/opt/grx/bin/shutdown.sh'
+```
+
+##### QNX リブートコマンド
+
+```
+QNX$ su -c '/bin/shutdown'
+```
+
+### ログファイルの定期メンテナンス
+
+### QNXのログファイル
+
+QNX のログファイルは `/opt/jsk/var/log` にあります.
+
+- Nameserver.log
+- Modelloader.log
+- rtcd.log
+
+これらのログファイルは自動的に生成されますが,自動的には削除されません.
+
+### ログファイルの圧縮・削除
+
+ディスクスペースにおいてログファイルはすぐに何ギガバイトにもなってしまします.
+これらのログファイルは自動的に削除される仕組みにはなっておりませんので,
+時おり `/opt/jsk/var/log` 下のログファイルを削除することをお勧めします.
+
+ログファイルの削除はスクリプトの実行もしくはリモートログインによる手動操作で行うことができます.
+
+##### スクリプト操作によるログファイルの圧縮
+
+```
+# Remove all raw .log files to free disk space. Same .zip file will be kept in the log folder.
+
+$ rosrun hironx_ros_bridge qnx_fetch_log.sh nextage qnx_nxo_user archive
+```
+
+##### 手動でのログファイルの削除
+
+QNX コンピュータログオンできる場合においては SSH 接続をして,
+ディレクトリ `/opt/jsk/var/log` 下にあるログファイルを削除することができます.
+
+##### ディスク空き容量の確認
+
+QNX コンピュータログオンできる場合においては SSH 接続をして,
+ディスクの空き容量を確認することができます.
+
+```
+QNX$ df -h
+```
+
+ディスク空き容量の例
+```
+/dev/hd0t179 7.8G 7.1G 725M 92% /
+/dev/hd0t178 229G 22G 207G 10% /opt/
+/dev/hd0 466G 466G 0 100%
+```
+
+
+### QNXでのインストールやソフトウェア利用
+
+HIRO / NEXTAGE OPEN ソフトウェアはすべて公開されていますが,
+それは HIRO / NEXTAGE OPEN でダウンロードしてただ実行するだけで済むということを意味していません.
+それらのソフトウェアは QNX オペレーティングシステム上で動いているコントローラボックスで
+ビルド・コンパイルする必要があります.
+QNX 上ででコンパイルするには,地域のベンダーから購入できる開発者ライセンスが必要です.
+
+QNX に必要なソフトウェアをインストールする方法も開示されていません.
+QNX は開発者ライセンス以外にも,その運用者は運用認定が必要もしくは十分に運用に精通している必要がある商用ソフトウェアです.
+また,QNX では頑強なパッケージングインフラストラクチャ(ROSのようなもの)がないため,
+インストール作業は非常に長い手作業となる可能性があり,エラーが発生しやすくなります.
+
+しかし,次のような場合には QNX 内での作業が必要となります.
+
+- 以前のクローズドソースの GRX コントローラに戻す必要があるとき
+- デバッグ時に Ubuntu ソフトウェアの API で見られるログだけでは原因が不明な場合に QNX 上のログファイルを見るとき
+
+このような場合には製造元またはソフトウェアサービスプロバイダからログオンアカウント情報を入手することができます.
+
+
+
diff --git a/doc/manual_ja_start.md b/doc/manual_ja_start.md
new file mode 100644
index 00000000..2d77713e
--- /dev/null
+++ b/doc/manual_ja_start.md
@@ -0,0 +1,311 @@
+# はじめに
+
+## 安全について
+
+NEXTAGE OPEN ロボットを動作させる前に必ず次の事項を確認してください.
+
+- ロボットが適切に設置されている
+- 周辺に動作に必要な空間が確保されている
+- 緊急停止スイッチがいつでも押せる状態になっている
+
+
+
+## クイックスタート
+
+### コンピュータの起動
+
+1. 台座の下部にキャスターを上下に動かすノブがあります.
+このノブを反時計回りに回してロボットを床に固定します.
+
+2. AC電源プラグは台座から出ています.電源につないでください.
+
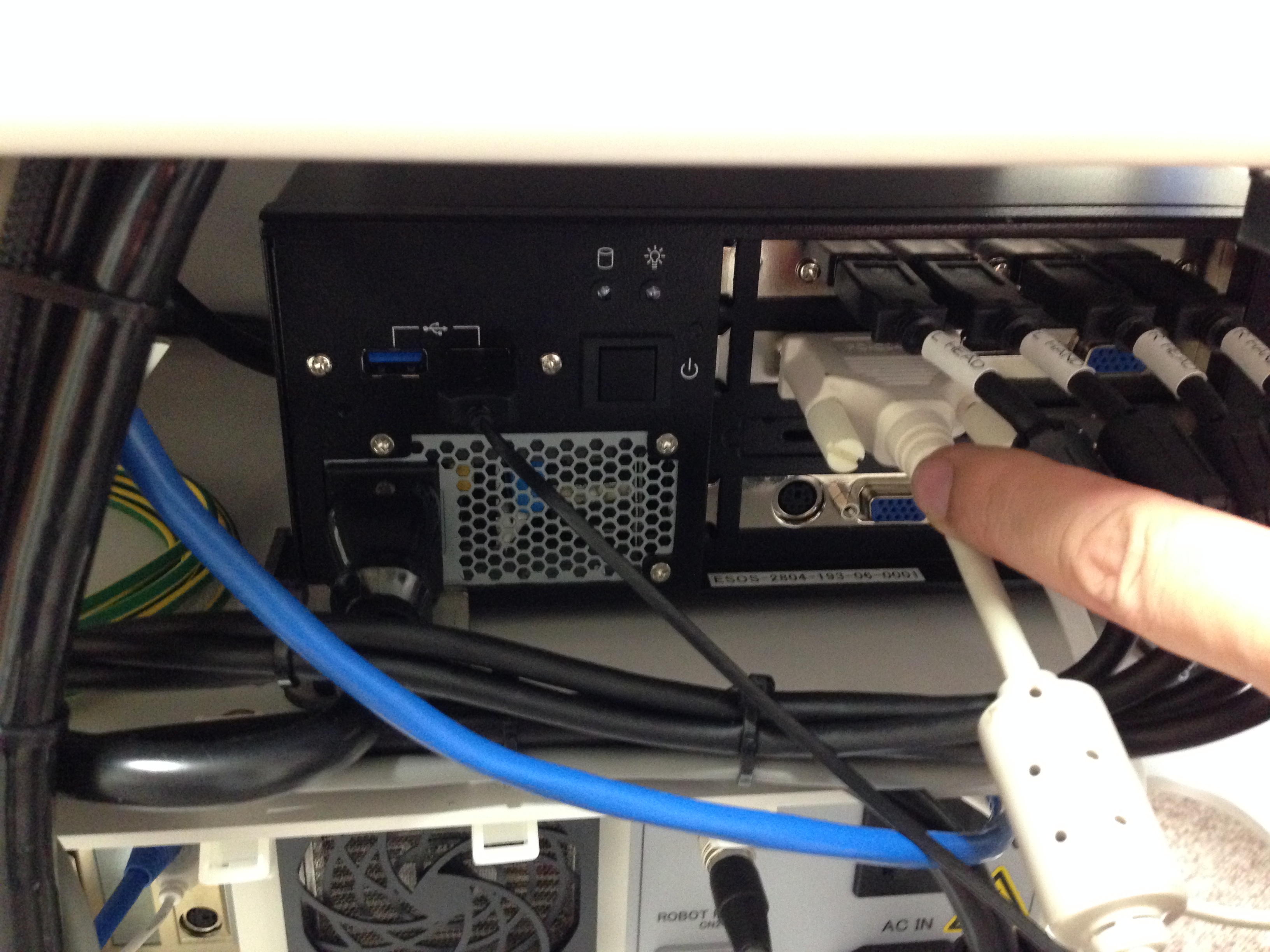
+3. キーボードとマウス,ディスプレイモニタをUIコントロールボックスに接続してください.
+UIコントロールボックスは2つあるコンピュータのうち上側のコンピュータです.
+
+
+
+4. AC電源を入れてください.コントローラボックスのメインスイッチが赤く点灯します.
+
+
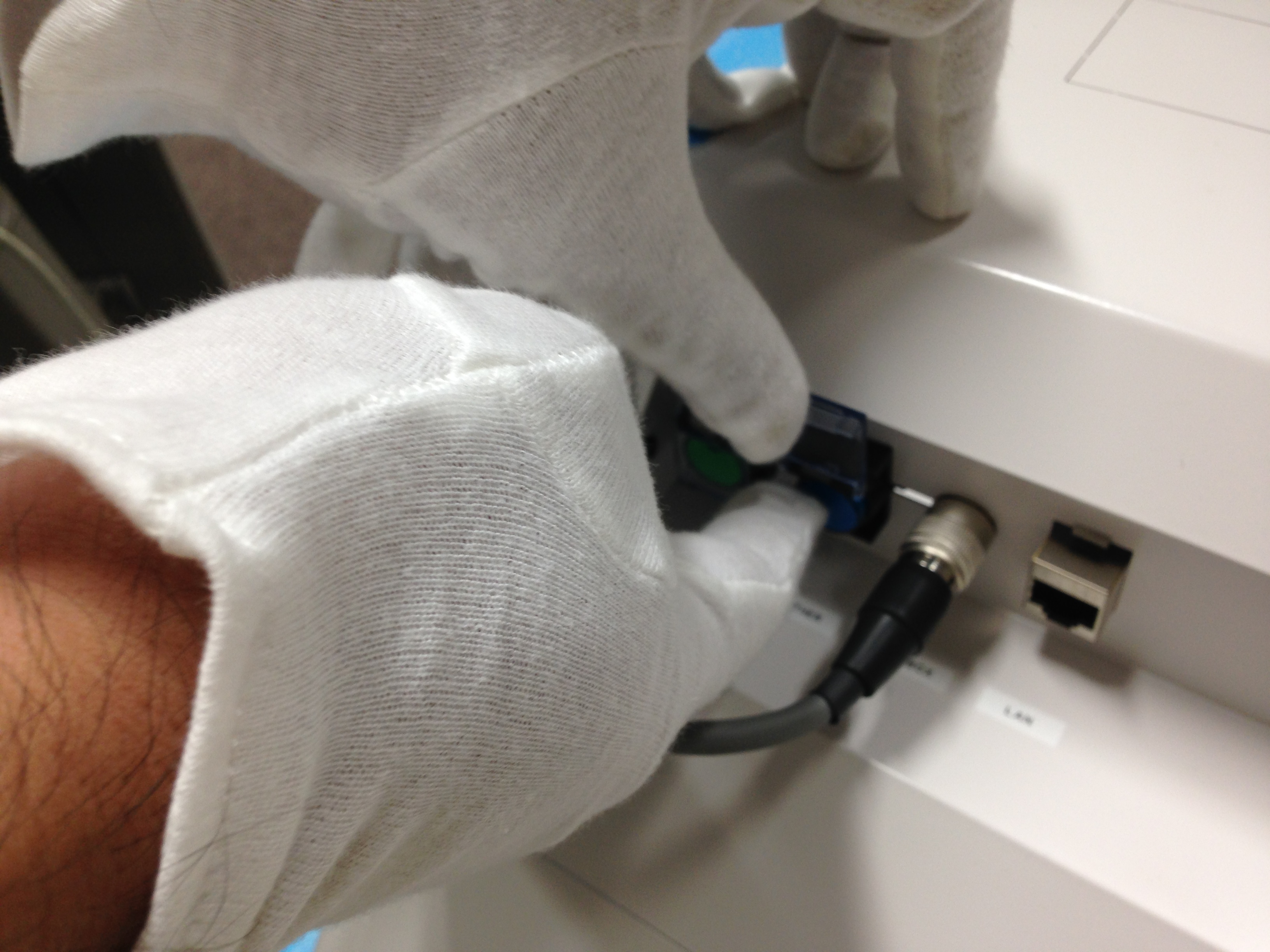
+5. スイッチボックスをロボットの後ろ側にあるコネクタに接続してください.
+
+
+6. ロボットの後ろ側にある緑色のボタンを押してください.ビープ音が1分ほど鳴ります.
+ロボット胸部にある4つのLEDライトが全て点滅します.
+
+
+
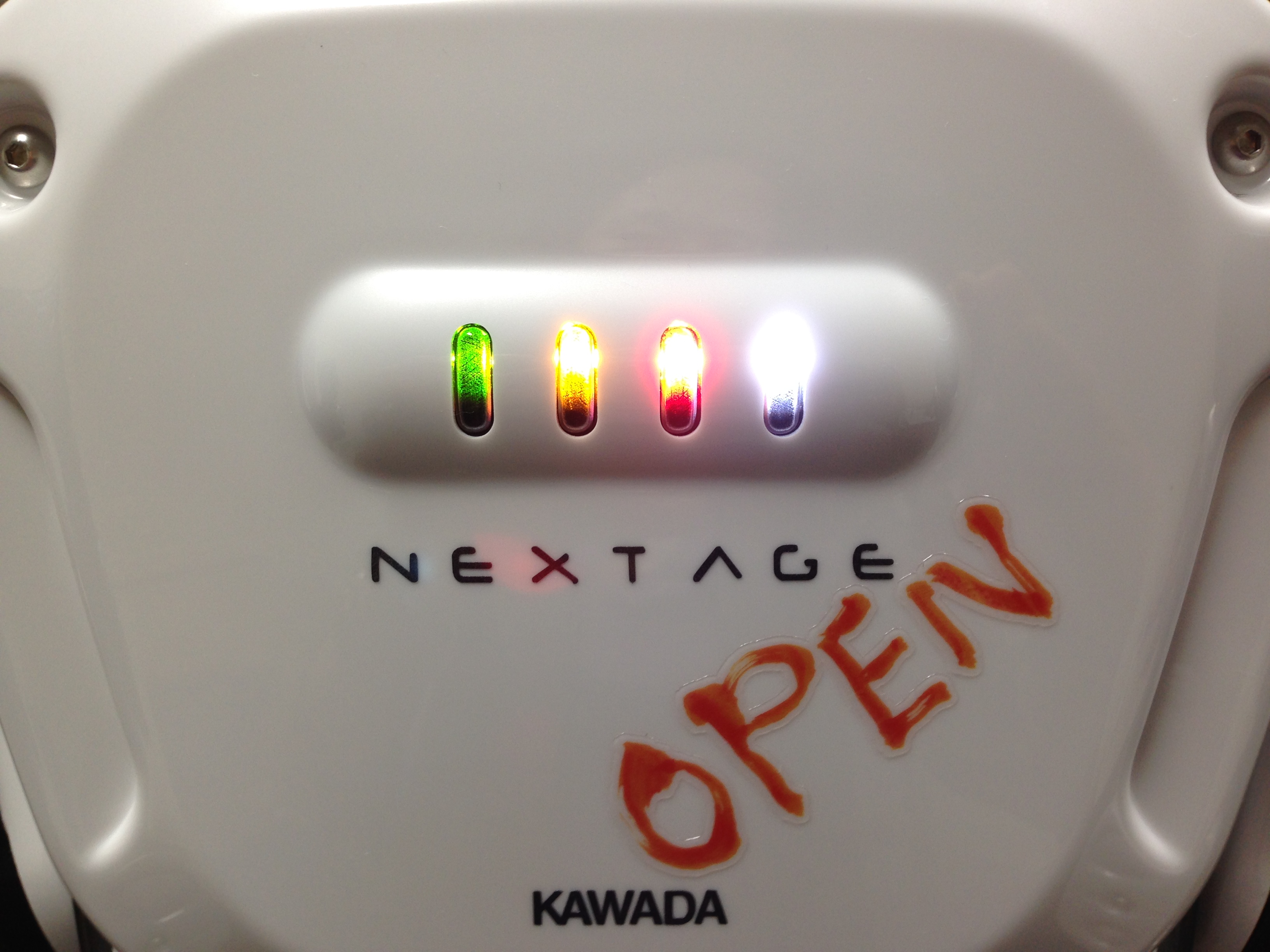
+7. ロボットの後ろ側にある青色のボタンを押してください.
+ロボットの胸部にある緑色と白色のLEDライトのみが点滅していたら,
+ロボットの動作準備が整った状態となっています.
+
+
+
+### ソフトウェアのアップデート
+
+ロボットは出荷状態においては Ubuntu 側のソフトウェアに最新のバージョンがインストールされていない場合があります.
+
+UIコントロールボックスのターミナルを開いて次の1行のコマンドを実行するとアップデートされます.
+本コマンド実行の際には別途通知されているルートパスワードが必要です.
+
+```
+$ sudo apt-get update && sudo apt-get dist-upgrade
+```
+
+### ROS サーバの起動
+
+#### rtm_ros_bridge の実行
+
+UIコントロールボックスのターミナルで下記のコマンドを実行して ROS ソフトウェアを実行します.
+
+```
+$ roslaunch hironx_ros_bridge hironx_ros_bridge_real.launch (HIRO)
+
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch (NEXTAGE OPEN)
+```
+
+デフォルト状態の NEXTAGE OPEN ではホスト名 `nextage` でアクセスすることができ,
+それは `nextage_ros_bridge_real.launch` 内に既に記述されています.
+
+ホスト名を変更した場合には下記コマンドの`%HOSTNAME%` の部分を変更したホスト名に置き換え,明示的にコマンドを実行してください.
+
+```
+$ roslaunch hironx_ros_bridge hironx_ros_bridge_real.launch nameserver:=%HOSTNAME% (HIRO)
+
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME% (NEXTAGE OPEN)
+```
+
+このプログラムはプログラムからロボットを操作するときには実行された状態である必要があります.
+
+#### ROS プロセスの確認
+
+rtm_ros_bridge を実行しているターミナルとは別のターミナルを開いてください.
+新しいターミナルで次のコマンドを実行することで動作しているROSノードを確認することができます.
+
+```
+$ rosnode list
+/diagnostic_aggregator
+/hrpsys_profile
+/hrpsys_ros_diagnostics
+/hrpsys_state_publisher
+/rosout
+```
+
+### Hironx Dashboard によるロボットの初期化
+
+#### rqt での Hironx Dashboard の起動
+
+Hironx Dashboard は rqt 上で動きますのでターミナルから rqt を起動します.
+
+```
+$ rqt
+```
+
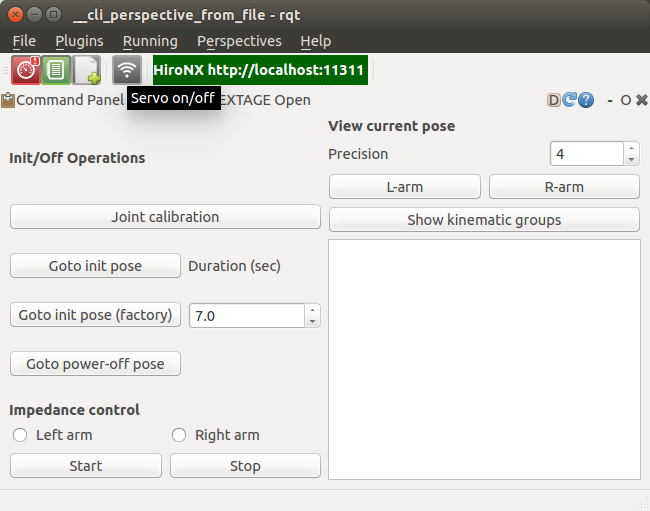
+rqt の Plugins で Hironx Dashboard を選択します.
+
+
+
+#### ロボットのキャリブレーション
+
+Hironx Dashboard からロボットの関節角度のエンコーダのキャリブレーションを行います.
+
+- 注意-1: スイッチボックスの緊急停止スイッチをいつでも押せる状態にしてください.
+- 注意-2: ロボットが動きます.
+
+Hironx Dashboard の [ Joint Calibration ] ボタンを押してください.
+
+次のようにロボットが動きます.
+
+FROM:
+
+
+TO:
+
+
+#### ロボットを初期姿勢にする
+
+ロボットの各関節を初期姿勢にします.
+
+- 注意: ロボットの全関節が動きます.(初期姿勢から外れいてる場合)
+
+Hironx Dahsboard の [ Goto init pose ] ボタンを押してください.
+
+
+### MoveIt! での動作の実行
+
+ROS の GUI も備えたモーションプランニングフレームワークの MoveIt! を用いてロボットを動かしてみます.
+
+#### MoveIt! の起動
+
+MoveIt! を起動します.新しくターミナルを開いて次のコマンドを実行してください.
+
+```
+$ roslaunch hironx_moveit_config moveit_planning_execution.launch (HIRO)
+
+$ roslaunch nextage_moveit_config moveit_planning_execution.launch (NEXTAGE OPEN)
+```
+
+
+
+#### MoveIt! での動作計画と実行
+
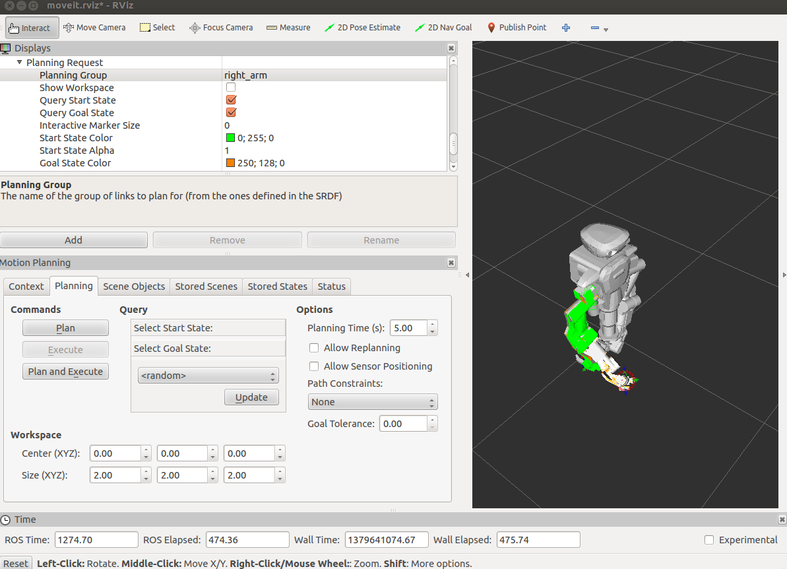
+MoveIt! 内に表示されているロボットモデルの手先に矢印や球で表現されているマーカがあります.
+これは InteractiveMarker と呼ばれるもので,これで手先の位置と姿勢を指定します.
+
+手先姿勢を変更する前に次の準備を実行してください.
+
+1. Planning タブ Querry の Select Start State: < current > で [ Update ] ボタンをクリック
+2. Planning タブ Querry の Select Goal State: < current > で [ Update ] ボタンをクリック
+
+InteractiveMarker をマウスでドラッグして少し移動させてみます.
+色違いの腕が表示されていることと思います.
+現在のロボットの姿勢と InteractiveMarker で指定した目標姿勢が表示されています.
+
+
+
+Planning タブ内の [ Plan ] ボタンをクリックしてください.
+MoveIt! 内においてアニメーションで腕が目標姿勢になるように動作計画が表示されていることと思います.
+
+アニメーション表示された動作計画で実機ロボット周囲の状況も含めて干渉など問題がないようでしたら,
+実際にロボットを目標姿勢になるように動かしてみます.
+
+- 注意: ロボットが動きます.
+
+Planning タブ内の [ Plan and Execute ] ボタンをクリックしてください.
+
+
+
+MoveIt! で動作計画したように実際にロボットが動いたことと思います.
+
+他の目標姿勢にも動かしてみます.
+ここでは MoveIt! にランダムな姿勢を生成させます.
+
+- 注意: 生成された目標姿勢に対するロボット周辺の状況を確認しながら下記の手順を進めてください.
+
+
+1. Planning タブ Querry の Select Start State: で < random valid > を選択
+2. Select Start State: [ Update ] ボタンをクリック(再クリックで再生成)
+3. Commands の [ Plan ] ボタンをクリック → 動作計画の確認
+4. ロボット動作環境などの安全確認
+5. Commands の [ Plan and Execute ] ボタンをクリック → 動作の実行
+
+
+
+> MoveIt! での動作計画と実行の手順まとめ
+>
+> 1. Planning タブ Querry の Select Start State: < current > で [ Update ] ボタンをクリック
+> 2. Planning タブ Querry の Select Goal State: < current > で [ Update ] ボタンをクリック
+> 3. MoveIt! 上の InteractiveMarker でロボットの手をドラックして目標姿勢に移動
+> 4. Planning タブ Commands の [ Plan ] ボタンをクリックして動作計画を確認
+> 5. ロボットの動作による周辺環境との干渉などの問題がないことを確認
+> 6. Planning タブ Commands の [ Plan and Execute ] ボタンをクリック
+
+
+### ロボットのシャットダウン処理
+
+#### ロボットをサーボオフ姿勢にする
+
+ロボットの各関節をサーボオフ姿勢にしてサーボ切ります.
+
+- 注意: ロボットが動きます.
+
+Hironx Dahsboard の [ Goto init pose ] ボタンを押してください.
+
+これによりロボットの各関節がサーボオフ姿勢になりサーボが切れます.
+
+#### 全プログラムの終了
+
+実行しているプログラムを全て終了します.
+全てのターミナルで `Ctrl-c` により終了してください.
+
+#### QNX の停止
+
+Ubuntu デスクトップ上にある NextageOpenSupervisor ツールを用いて QNX コンピュータのシャットダウンを行ってください.
+
+#### Ubuntu の終了
+
+コマンド `$ sudo shutdown now` などで Ubuntu を終了します.
+
+- 注意: 不在時もコンピュータをオンにしておく場合は製造元の指示に従ってください.
+
+
+## 動力学シミュレーション
+
+### RTM の動力学シミュレーション - hrpsys-simulator
+
+ロボットの核となる機能は OpenRTM というフレームワーク上で動いています.
+この OpenRTM をベースとした hrpsys-simulator と呼ばれるシミュレータでロボットの機能を仮想的に実現することができます.
+このシミュレータは ROS が提供する高層レイヤを使用しなくても利用できます.
+
+特別な目的ではないプログラムを実行する多くの場合においてこのシミュレータで十分です.
+
+#### シミュレータの実行
+
+実際のロボットを「模倣する」シミュレータを起動します.
+`rosaunch` ではなく `rtmlaunch` であることに注意して次のコマンドを実行してください.
+
+```
+$ rtmlaunch hironx_ros_bridge hironx_ros_bridge_simulation.launch (HIRO)
+
+$ rtmlaunch nextage_ros_bridge nextage_ros_bridge_simulation.launch (NEXTAGE OPEN)
+```
+
+> この launch ファイルは主に次の2つを実行します.
+>
+> まずはシミュレータに仮想ロボットを読み込みます.
+>
+> ```
+> $ rtmlaunch hironx_ros_bridge hironx_startup.launch
+> ```
+>
+> このシミュレーションのロボットは OpenRTM ベースのソフトウェア上のみで実行されています.
+>
+> 次に ROS 経由でこのロボットを動作させるために ROS と OpenRTM の2つの空間を結ぶ「橋」をつくります.
+>
+> ```
+> $ roslaunch hironx_ros_bridge hironx_ros_bridge.launch (HIRO)
+>
+> $ roslaunch nextage_ros_bridge nextage_ros_bridge.launch (NEXTAGE OPEN)
+> ```
+
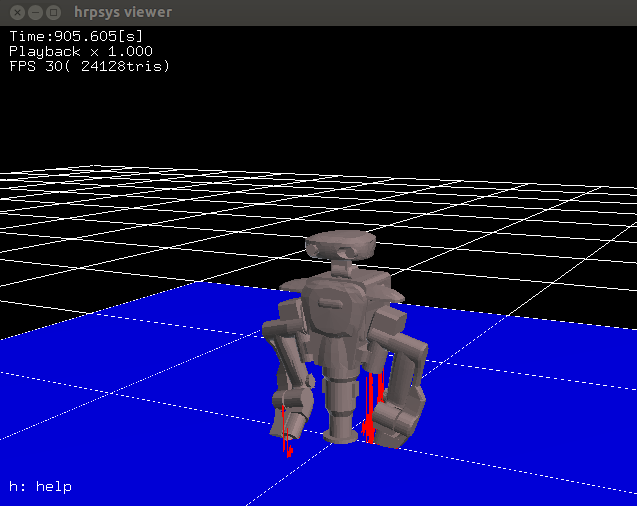
+次のようなコマンドプロンプトが表示されていたら,シミュレーションが正常に動作しています.
+
+```
+[ INFO] [1375160303.399785831, 483.554999999]: [HrpsysSeqStateROSBridge0] @onExecutece 0 is working at 201[Hz]
+[ INFO] [1375160304.408500642, 484.544999999]: [HrpsysSeqStateROSBridge0] @onExecutece 0 is working at 198[Hz]
+```
+
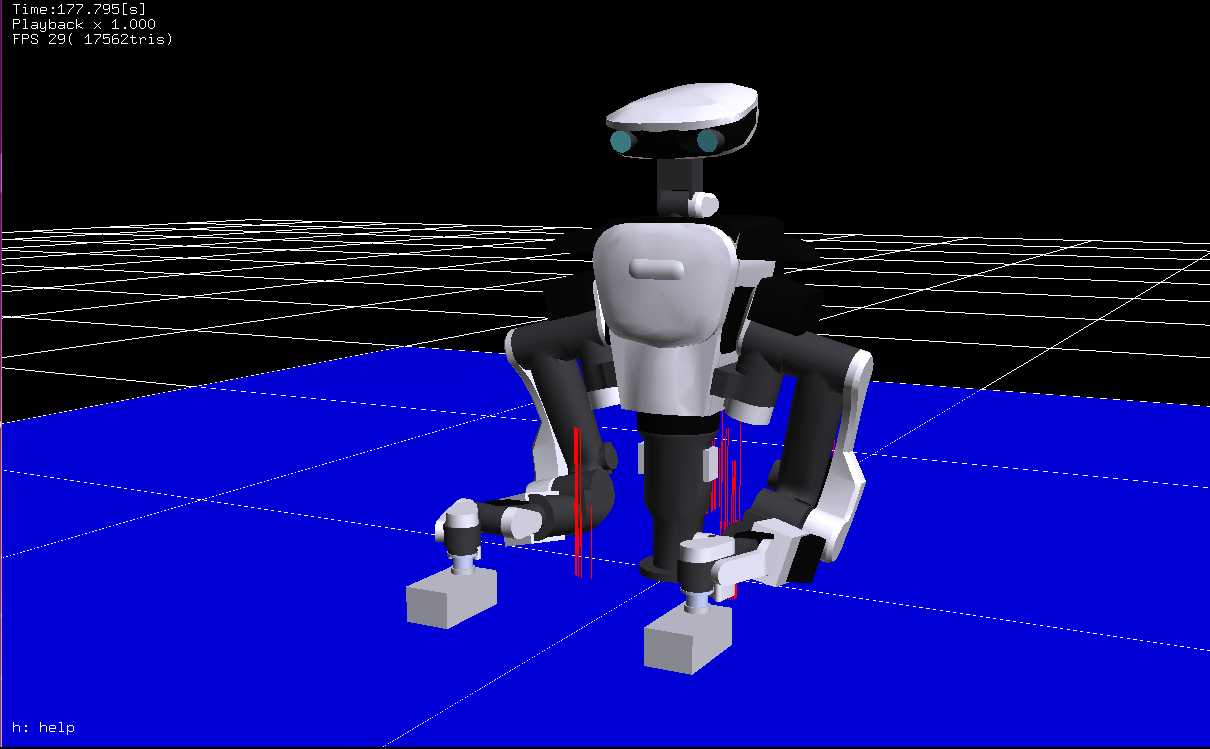
+そして hrpsys simulator viewer が次のように表示されます.
+
+
+
+
+#### MoveIt! の起動とシミュレーションロボットの操作
+
+ロボット実機と同じように MoveIt! を起動してシミュレーション上のロボットを操作することができます.
+
+```
+$ roslaunch hironx_moveit_config moveit_planning_execution.launch (HIRO)
+
+$ roslaunch nextage_moveit_config moveit_planning_execution.launch (NEXTAGE OPEN)
+```
+
+MoveIt! 内での操作も実機のロボットとシミュレーション上のロボットでは同じです.
+InteractiveMarker を動かし,動作計画をし,実行します.
+
+
+### ROS の動力学シミュレーション - Gazebo
+
+NEXTAGE OPEN の Gazebo シミュレーションを起動します.
+
+- メモ: ROS / Gazebo でのシミュレーションのため rtm_ros_bridge は不要
+
+```
+$ roslaunch nextage_gazebo nextage_world.launch
+```
+
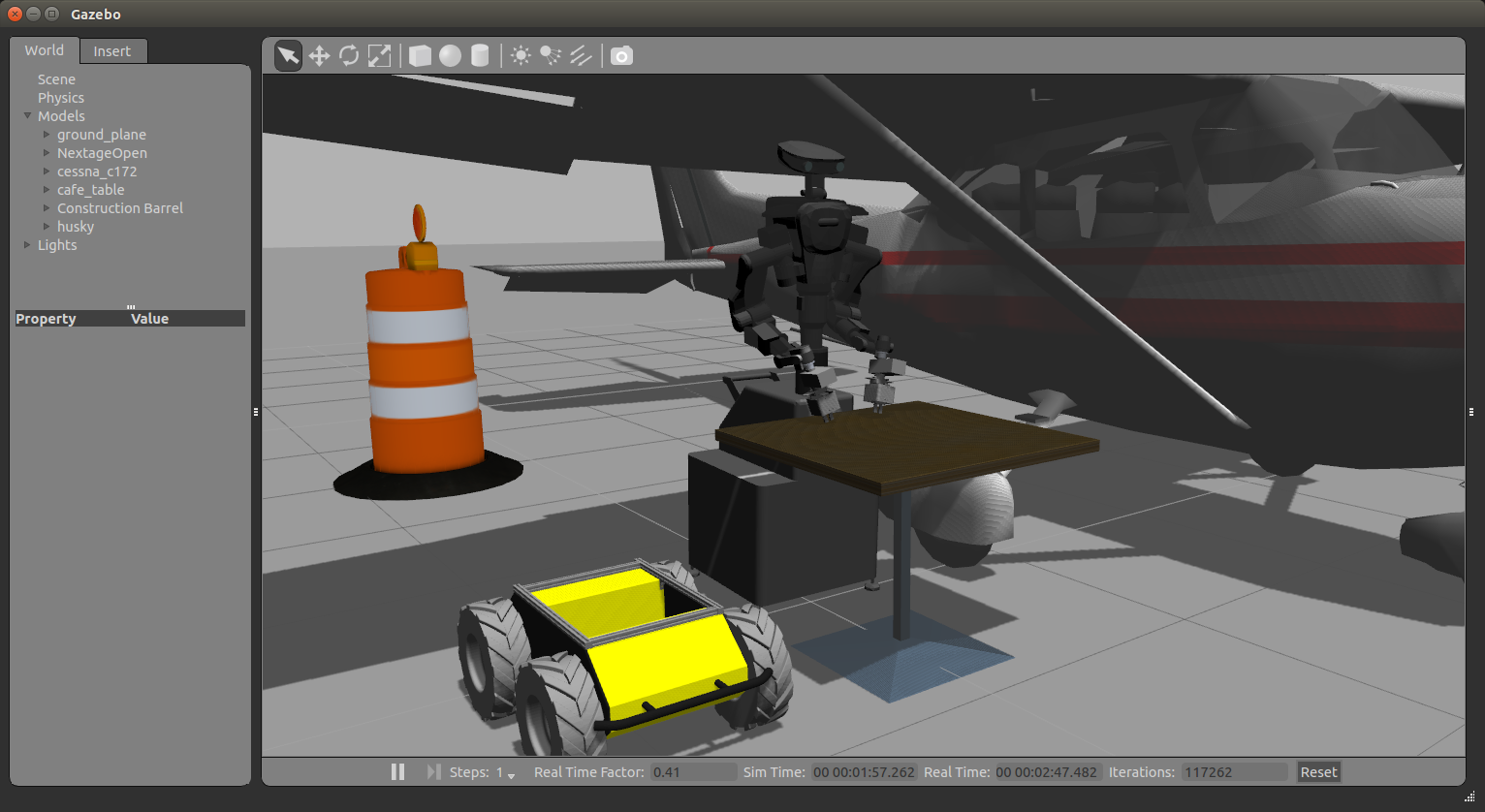
+Gazebo nextage_world に
+セスナ機,カフェのテーブル,建設用のバレル,HUSKYロボットオブジェクトをインサートした図
+
+
+
diff --git a/doc/manual_ja_trouble-shooting.md b/doc/manual_ja_trouble-shooting.md
new file mode 100644
index 00000000..7bbe0a24
--- /dev/null
+++ b/doc/manual_ja_trouble-shooting.md
@@ -0,0 +1,308 @@
+
+# トラブルシューティング
+
+## ソフトウェア情報の確認
+
+### コントローラボックス(QNX)の hrpsys のバージョンの確認
+
+Python インタフェースから次のコマンドを実行して
+コントローラボックス(QNXコンピュータ)で動作している hrpsys のバージョンを確認してください.
+
+```
+In [1]: robot.hrpsys_version
+Out[1]: '315.2.8
+```
+
+コントローラボックスにログオンできる場合にはリモート接続をして
+次のコマンドを実行して確認することもできます.
+
+- 注意: バージョン 315.2.0 以降にて可能
+
+```
+$ cd /opt/jsk/lib
+$ ls -l RobotHardware.so
+$ strings RobotHardware.so | grep ^[0-9]*\\.[0-9]*\\.[0-9]*$
+315.2.0
+```
+
+
+## RTM ステートのモニタリング
+
+ロボットホスト上で動作しているRTコンポーネントのリストを取得するには `rtls` を利用します.
+
+- 注意: 最後のスラッシュ `/` を忘れずに入力してください.
+
+```
+$ rtls %HOST_ROBOT%:15005/
+```
+
+> シミュレーションの場合の例
+>
+> ```
+> $ rtls localhost:15005/
+> ```
+>
+> Nextage Open の場合の例(ホスト名をユーザの環境に合わせて変更してください)
+>
+> ```
+> $ rtls nextage:15005/
+> ```
+
+`rtls` の実行例(シミュレーション)
+
+```
+$ rtls localhost:15005/
+robotuser-PC.host_cxt/ StateHolderServiceROSBridge.rtc
+fk.rtc DataLoggerServiceROSBridge.rtc
+longfloor(Robot)0.rtc ImageSensorROSBridge_HandLeft.rtc
+sh.rtc HiroNX(Robot)0.rtc
+ImageSensorROSBridge_HeadRight.rtc seq.rtc
+HrpsysJointTrajectoryBridge0.rtc log.rtc
+HGcontroller0.rtc sc.rtc
+ModelLoader el.rtc
+CollisionDetector0.rtc ImageSensorROSBridge_HandRight.rtc
+ImageSensorROSBridge_HeadLeft.rtc HrpsysSeqStateROSBridge0.rtc
+SequencePlayerServiceROSBridge.rtc ForwardKinematicsServiceROSBridge.rtc
+ic.rtc rmfo.rtc
+```
+
+`rtls` で得られたリストの各RTコンポーネントの情報を得るには `rtcat` を利用します.
+
+```
+$ rtls %HOST_ROBOT%:15005/%CONPONENT_NAME%
+```
+
+`rtcat` の実行例(シミュレーション)
+
+```
+$ rtcat localhost:15005/fk.rtc
+fk.rtc Active
+ Category example
+ Description forward kinematics component
+ Instance name fk
+ Type name ForwardKinematics
+ Vendor AIST
+ Version 315.14.0
+ Parent
+ Type Monolithic
+ +Extra properties
++Execution Context 0
++DataInPort: q
++DataInPort: sensorRpy
++DataInPort: qRef
++DataInPort: basePosRef
++DataInPort: baseRpyRef
++CorbaPort: ForwardKinematicsService
+
+$ rtcat localhost:15005/CollisionDetector0.rtc
+CollisionDetector0.rtc Active
+ Category example
+ Description collisoin detector component
+ Instance name CollisionDetector0
+ Type name CollisionDetector
+ Vendor AIST
+ Version 315.14.0
+ Parent
+ Type Monolithic
+ +Extra properties
++Execution Context 0
++DataInPort: qRef
++DataInPort: qCurrent
++DataInPort: servoStateIn
++DataOutPort: q
++DataOutPort: beepCommand
++CorbaPort: CollisionDetectorService
+
+$ rtcat localhost:15005/ImageSensorROSBridge_HeadRight.rtc
+ImageSensorROSBridge_HeadRight.rtc Active
+ Category example
+ Description openrhp image - ros bridge
+ Instance name ImageSensorROSBridge_HeadRight
+ Type name ImageSensorROSBridge
+ Vendor Kei Okada
+ Version 1.0
+ Parent
+ Type Monolithic
+ +Extra properties
++Execution Context 0
++DataInPort: image
++DataInPort: timedImage
+robotuser@robotuser-PC:~$
+```
+
+
+## ROS ステートのモニタリング
+
+### ROS 環境の確認
+
+#### ROS のバージョンの確認
+
+```
+$ rosversion -d
+```
+
+#### ROS に関する環境変数の確認
+
+```
+$ env | grep ROS
+```
+
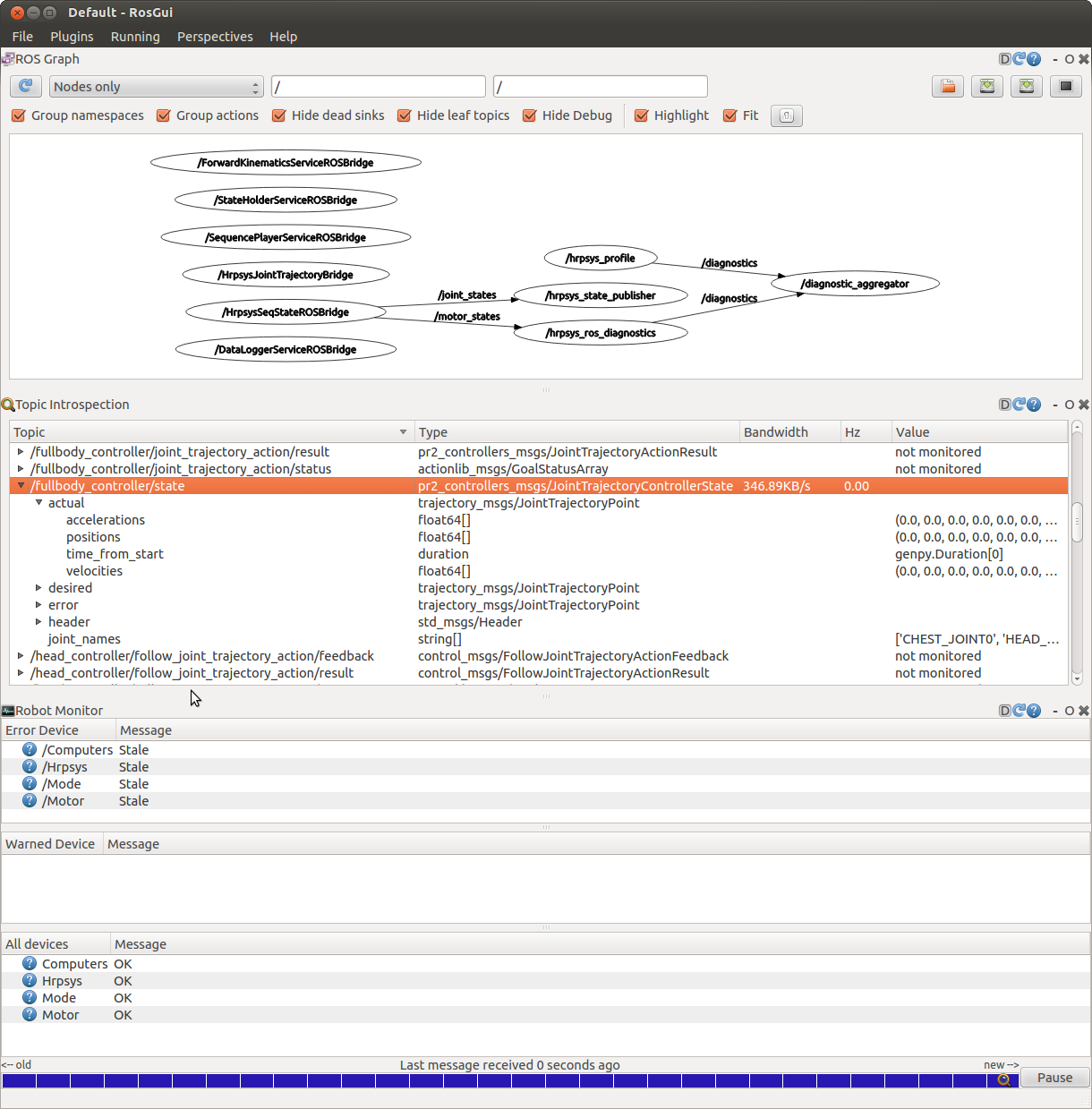
+### rqt を用いたモニタリング
+
+ROS の rqt は開発時におけるデータの可視化に大変役立つツールセットです.
+ここでは HIRO / NEXTAGE OPEN において特に便利ないくつかのツールを紹介します.
+
+- 参考: rqt/Plugins - ROS Wiki http://wiki.ros.org/rqt/Plugins
+
+まず rqt を起動します.
+
+```
+$ rqt
+```
+
+次に "Plugins" をクリックして以下のプラグインを選択します.
+
+- ROS Graph ( [rqt_graph](http://wiki.ros.org/rqt_graph) )
+- Robot Monitor ( [rqt_robot_monitor](http://wiki.ros.org/rqt_robot_monitor) )
+- Topic Introspection ( [rqt_topic](http://wiki.ros.org/rqt_topic) )
+
+下図のようなウィンドウが表示されるはずです.
+
+- 注意: この画像はロボットモニタの診断が無効なシミュレータでキャプチャされたため,失効ステータスが表示されています.
+
+
+
+
+## QNXでのトラブルシューティング
+
+HIRO / NEXTAGE OPEN の QNX 内プロセスの状態を見るリモート監視ツールがないため,
+その状態を見るためには QNX コンピュータ上のログファイルの内容を見る必要があります.
+
+### ログの回収
+
+QNX のログファイルは `/opt/jsk/var/log` にあります.
+
+- Nameserver.log
+ - OpenRTM または CORBA に関係したログの多くが記載
+- Modelloader.log
+ - OpenHRP3 に関するログ
+- rtcd.log
+ - hrpsys のRTコンポーネントに関連したログ
+
+これらのログファイルは次のいずれかの方法で取得することができます.
+
+##### 【推奨】 ログファイルの zip ボールを取得するスクリプトを実行する
+
+- 注意: rtmros_hironx 1.1.25 以降で利用可能
+
+```
+# Simplest
+
+$ rosrun hironx_ros_bridge qnx_fetch_log.sh nextage qnx_nxo_user
+:
+$ ls
+opt_jsk_var_logs_20170602-020236.zip
+
+# Fetch only files generated after certain date. "1" can be anything except "archive"
+
+$ rosrun hironx_ros_bridge qnx_fetch_log.sh nextage qnx_nxo_user 1 2017-01-11
+```
+
+##### 【代替】 QNX にリモート接続する
+
+QNX コンピュータに SSH 接続をして,
+ディレクトリ `/opt/jsk/var/log` 下にあるログファイルにアクセスしてください.
+
+### ログのチェック
+
+#### ロボット胸部の4つ全てのランプが電源投入後も点滅し続けている場合
+
+電源投入後正常起動した場合はロボット胸部の緑と白の LED ライトだけが点滅する状態となります.
+この場合においてもまだロボット胸部の4つのランプが全て点滅し続けている場合は QNX のログを確認してください.
+
+`/opt/jsk/var/log/rtcd.log` が次のようになってるかを確認してください.
+
+```
+Logger::Logger: streambuf address = 0x805fc70
+hrpExecutionContext is registered
+pdgains.file_name: /opt/jsk/etc/HIRONX/hrprtc/PDgains.sav
+dof = 15
+open_iob - shmif instance at 0x80b3f58
+the number of gyros = 0
+the number of accelerometers = 0
+the number of force sensors = 0
+period = 5[ms], priority = 49
+```
+
+`/opt/jsk/var/log/Nameserver.log` が次のようになってるかを確認してください.
+
+```
+Sat Jan 24 10:55:33 2015:
+
+Starting omniNames for the first time.
+Wrote initial log file.
+Read log file successfully.
+Root context is IOR:010000002b00000049444c3a6f6d672e6f72672f436f734e616d696e672f4e616d696e67436f6e74
+6578744578743a312e300000010000000000000070000000010102000d0000003139322e3136382e312e313600009d3a0b00
+00004e616d6553657276696365000300000000000000080000000100000000545441010000001c0000000100000001000100
+0100000001000105090101000100000009010100035454410800000095fbc2540100001b
+Checkpointing Phase 1: Prepare.
+Checkpointing Phase 2: Commit.
+Checkpointing completed.
+
+Sat Jan 24 11:10:33 2015:
+
+Checkpointing Phase 1: Prepare.
+Checkpointing Phase 2: Commit.
+Checkpointing completed.
+```
+
+`/opt/jsk/var/log/ModelLoader.log` が次のようになっているかを確認してください.
+
+```
+ready
+loading /opt/jsk/etc/HIRONX/model/main.wrl
+Humanoid node
+Joint nodeWAIST
+ Segment node WAIST_Link
+ Joint nodeCHEST_JOINT0
+ Segment node CHEST_JOINT0_Link
+ Joint nodeHEAD_JOINT0
+ Segment node HEAD_JOINT0_Link
+ Joint nodeHEAD_JOINT1
+ Segment node HEAD_JOINT1_Link
+ VisionSensorCAMERA_HEAD_R
+ VisionSensorCAMERA_HEAD_L
+ Joint nodeRARM_JOINT0
+ Segment node RARM_JOINT0_Link
+ Joint nodeRARM_JOINT1
+ Segment node RARM_JOINT1_Link
+ Joint nodeRARM_JOINT2
+ Segment node RARM_JOINT2_Link
+ Joint nodeRARM_JOINT3
+ Segment node RARM_JOINT3_Link
+ Joint nodeRARM_JOINT4
+ Segment node RARM_JOINT4_Link
+ Joint nodeRARM_JOINT5
+ Segment node RARM_JOINT5_Link
+ Joint nodeLARM_JOINT0
+ Segment node LARM_JOINT0_Link
+ Joint nodeLARM_JOINT1
+ Segment node LARM_JOINT1_Link
+ Joint nodeLARM_JOINT2
+ Segment node LARM_JOINT2_Link
+ Joint nodeLARM_JOINT3
+ Segment node LARM_JOINT3_Link
+ Joint nodeLARM_JOINT4
+ Segment node LARM_JOINT4_Link
+ Joint nodeLARM_JOINT5
+ Segment node LARM_JOINT5_Link
+The model was successfully loaded !
+```
+
+すべてのログが上記のような表示でしたらログに関しては正常で,
+他に何か複雑なことが起こっている可能性があります.
+サポートにお問い合わせください.
+
+
+
diff --git a/doc/manual_ja_tutorial_3d-perception.md b/doc/manual_ja_tutorial_3d-perception.md
new file mode 100644
index 00000000..97051682
--- /dev/null
+++ b/doc/manual_ja_tutorial_3d-perception.md
@@ -0,0 +1,469 @@
+
+# チュートリアル: 3次元認識
+
+## ロボット搭載カメラの設定
+
+### NEXTAGE OPEN のカメラ
+
+NEXTAGE OPEN(HIRO ではない)はデフォルトで頭部に2つ,左右ハンドに1つずつで
+合計4つの IDS Ueye カメラが搭載されています.
+それらのカメラの操作は ueye_cam パッケージにて行われ,基本的にそれは
+
+- nextage_ros_bridge/launch/nextage_ueye_stereo.launch
+- nextage_ros_bridge/launch/hands_ueye.launch
+
+内にてまとめられています.
+
+- 注意: HIRO のカメラについて
+ - 本項で記述されている内容は HIRO に搭載されているカメラに関するものではありません.
+ - HIRO のカメラを動作させる方法は本項で説明されている内容と異なる可能性があります.
+
+### ユーザ独自のカメラの利用について
+
+デフォルトで搭載されている以外のカメラも
+ROS のドライバがあるものについては使用することができます.
+既に ROS のドライバが存在しているカメラの情報は次のリンク先で知ることができます.
+
+- Sensors/Cameras - ROS Wiki
+ - http://wiki.ros.org/Sensors/Cameras
+ - 注意: 手作業で更新されているので全ての情報を網羅するものではありません.
+
+ユーザによっては Kinect や Xtion カメラをロボット頭部に搭載して利用したりしています.
+そのような場合には tf の確認や MoveIt! で衝突判定を行うのであれば
+カメラの 3D モデルなどを構築してロボットモデルを更新する必要があります.
+
+### ヘッドカメラの設定
+
+#### Ueye カメラノードの実行
+
+まずロボット頭部のカメラが頭部に設置されていることを確認してください.
+ステレオカメラのノードを実行します.
+
+```
+$ roslaunch nextage_ros_bridge nextage_ueye_stereo.launch
+```
+
+このノードでは ueye_cam パッケージを利用していますので
+次のように映像トピックをサブスクライブ(購読)することができます.
+
+```
+$ rostopic echo left/image_raw
+$ rostopic echo right/image_raw
+```
+
+映像は rqt_image_view などの GUI ツールを使用して見ることができます.
+
+#### ステレオカメラのキャリブレーション
+
+ステレオカメラを利用する前にはキャリブレーション作業が必要です.
+
+- How to Calibrate a Stereo Camera - ROS Wiki
+ - http://wiki.ros.org/camera_calibration/Tutorials/StereoCalibration
+
+次のコマンドでステレオカメラのキャリブレーションを行います.
+
+```
+$ rosrun camera_calibration cameracalibrator.py --size 4x6 --square 0.024 --approximate=0.1 --camera_name=stereo_frame right:=/right/image_raw left:=/left/image_raw right_camera:=/right left_camera:=/left
+```
+
+キャリブレーション結果のデータは /.ros/camera_info 内に保存してください.
+このデータは消さないようにしてださい.
+
+### ハンドカメラの設定
+
+次のコマンドにより左右ハンドに搭載されている合計2つのカメラを動作させます.
+
+```
+$ roslaunch nextage_ros_bridge hands_ueye.launch
+```
+
+ハンドカメラの映像は次のトピックにより購読できます.
+
+```
+$ rostopic echo /left_hand_ueye/image_raw (left)
+$ rostopic echo /right_hand_ueye/image_raw (right)
+```
+
+
+## AR マーカを使ったオブジェクト認識と動作計画
+
+AR マーカをロボットのカメラ画像から認識します.
+
+### AR マーカ認識プログラムの実行
+
+新しいターミナルで AR マーカの認識プログラムを起動します.
+ar.launch では NEXTAGE OPEN ロボットの右手 Ueye カメラの画像から AR マーカの検出をします.
+
+```
+$ roslaunch nextage_ros_bridge ar.launch marker_size:=4.5
+```
+
+> ar.launch 内で認識させる AR マーカの大きさなどが書かれています.
+>
+> ```xml
+>
+>
+>
+>
+>
+>
+>
+>
+>
+> respawn="false" output="screen"
+> args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)" />
+>
+> ```
+>
+> AR マーカのサイズは次に示すところに単位センチメートルで記述されています.
+>
+> ```
+>
+> ```
+>
+> デフォルトの 5.5 [cm] 以外のサイズの AR マーカを認識させる場合には
+> 次のように ar.launch 実行時に引数でサイズを指定して実行します.
+>
+> ```
+> $ roslaunch nextage_ros_bridge ar.launch marker_size:=4.5
+> ```
+>
+> - メモ: AR マーカのサイズ = マーカの黒い部分全体の辺の長さ
+
+
+### MoveIt! と AR マーカの表示
+
+MoveIt! を起動してください.
+
+```
+$ roslaunch nextage_moveit_config moveit_planning_execution.launch
+```
+
+MoveIt! でロボットのカメラ映像を表示させます.
+
+1. [ Add ] ボタンをクリック
+2. “rviz” → “Image” をクリックして選択 → “Image” の子ウィンドウが表示
+3. Displays → Image → Image Topic の項目で /right_hand_ueye/image_raw を選択
+
+AR マーカが印刷された紙などを右手のカメラに映るように設置してください.
+必要であればロボットの腕も�動かしてください.
+ここでは AR 番号が ar_marker_4 でサイズが 4.5 cm としています.
+
+次にマーカの処理結果を表示させます.
+
+1. [ Add ] ボタンをクリック
+2. ”rviz” → ”Marker” をクリック
+3. [ Add ] ボタンをクリック
+4. ”rviz” → ”TF” をクリック
+5. Displays → TF → Frames → All Enabled のチェックを外す
+6. Displays → TF → Frames → /ar_marker_4 のチェックを入れる
+
+AR マーカの各番号に対応した色の四角い立体とその tf が MoveIt! / RViz 上で表示されます.
+
+MoveIt! / RViz の設定を保存しておくと上記の追加作業が不要になるので便利です.
+MoveIt! / RViz の File メニューから Save Config As を選択して,
+例えばファイル名 moveit-ar.rviz などの名前で設定を保存します.
+
+MoveIt! / RViz で保存してある設定を利用するには File メニューの Open Config から設定ファイルを読み込みます.
+
+
+### AR マーカ認識に基づく動作計画と実行
+
+デモンストレーションプログラム ar_demo.py は AR マーカを認識して得られた座標を基に
+MoveIt Commander を利用して動作計画・指示・実行などを行います.
+
+ar_demo.py のコードは次のようになっています.
+
+```python
+#!/usr/bin/env python
+
+import rospy
+import tf
+import geometry_msgs.msg
+import sys
+
+from moveit_commander import MoveGroupCommander
+from tf.transformations import *
+import math
+
+def kbhit():
+ import select
+ return sys.stdin in select.select([sys.stdin], [], [], 0)[0]
+
+if __name__ == '__main__':
+ rospy.init_node('ar_pose_commander', anonymous=True)
+ group = MoveGroupCommander("right_arm")
+
+ base_frame_id = '/WAIST'
+ ar_marker_id = '/ar_marker_4'
+
+ pub = rospy.Publisher('target_pose', geometry_msgs.msg.PoseStamped)
+ listener = tf.TransformListener()
+
+ rate = rospy.Rate(10.0)
+ pose_st_target = None
+ while not rospy.is_shutdown() and not kbhit():
+ try:
+ now = rospy.Time(0)
+ (trans,quat) = listener.lookupTransform(base_frame_id, ar_marker_id, now)
+ quat = quaternion_multiply(quat, quaternion_about_axis(math.pi/2, (1,0,0)))
+ quat = quaternion_multiply(quat, quaternion_about_axis(math.pi/2, (0,0,1)))
+ pose_st_target = geometry_msgs.msg.PoseStamped()
+ pose_st_target.pose.position.x = trans[0]
+ pose_st_target.pose.position.y = trans[1]
+ pose_st_target.pose.position.z = trans[2]
+ pose_st_target.pose.orientation.x = quat[0]
+ pose_st_target.pose.orientation.y = quat[1]
+ pose_st_target.pose.orientation.z = quat[2]
+ pose_st_target.pose.orientation.w = quat[3]
+ pose_st_target.header.frame_id = base_frame_id
+ pose_st_target.header.stamp = now
+ except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException) as e:
+ rospy.logwarn(e)
+
+ if pose_st_target:
+ pub.publish(pose_st_target)
+ rospy.loginfo(trans)
+
+ rate.sleep()
+
+ if raw_input() == 'q':
+ sys.exit(1)
+
+ # move to a point above ar marker
+ pose_st_target.pose.position.z += 0.3
+ rospy.loginfo("set target to {}".format(pose_st_target.pose))
+ group.set_pose_target(pose_st_target.pose)
+ plan = group.plan()
+ rospy.loginfo("plan is {}".format(plan))
+ ret = group.go()
+ rospy.loginfo("executed ... {}".format(ret))
+
+```
+
+デモンストレーションコードの中から主要な行について解説します.
+
+右手を動かします.そのために `"right_arm"` を引数として渡して
+`MoveGroupCommander` をインスタンス化します.
+
+```python
+ group = MoveGroupCommander("right_arm")
+```
+
+基準となるフレームを `/WAIST` に
+ターゲットとする AR マーカのフレームを `/ar_maker_4` として変数に格納します.
+AR マーカのターゲットを変えたい場合はここを変更すれば良いことになります.
+
+```python
+ base_frame_id = '/WAIST'
+ ar_marker_id = '/ar_marker_4'
+```
+
+サンプリング周波数 10 Hz を `rate = rospy.Rate(10.0)` で指定して
+基準フレームとターゲットの AR マーカのフレーム間の TF を取得します.
+ターゲット取得ループは Enter キーが押されると抜けるようにしています.
+
+```python
+ listener = tf.TransformListener()
+
+ rate = rospy.Rate(10.0)
+ pose_st_target = None
+ while not rospy.is_shutdown() and not kbhit():
+ try:
+ now = rospy.Time(0)
+ (trans,quat) = listener.lookupTransform(base_frame_id, ar_marker_id, now)
+```
+
+TF で取得された AR マーカフレームの姿勢から右腕エンドエフェクタの目標姿勢になるように
+クォータニオンの計算をします.
+
+```python
+ quat = quaternion_multiply(quat, quaternion_about_axis(math.pi/2, (1,0,0)))
+ quat = quaternion_multiply(quat, quaternion_about_axis(math.pi/2, (0,0,1)))
+```
+
+TF で取得した AR マーカフレームの位置と計算されたターゲットの姿勢を
+`pose_st_target` に格納します.
+
+```python
+ pose_st_target = geometry_msgs.msg.PoseStamped()
+ pose_st_target.pose.position.x = trans[0]
+ pose_st_target.pose.position.y = trans[1]
+ pose_st_target.pose.position.z = trans[2]
+ pose_st_target.pose.orientation.x = quat[0]
+ pose_st_target.pose.orientation.y = quat[1]
+ pose_st_target.pose.orientation.z = quat[2]
+ pose_st_target.pose.orientation.w = quat[3]
+```
+
+Enter キーが押されるとターゲット取得ループから抜けて
+右腕のエンドエフェクタを AR マーカ `/ar_marker_4` の真上に右手を動かします.
+
+まず,エンドエフェクタをターゲットの 0.3 [m] 上方に動くように位置を再計算してから,
+右腕の Group に対して目標姿勢として設定します.
+
+```python
+ pose_st_target.pose.position.z += 0.3
+ group.set_pose_target(pose_st_target.pose)
+```
+
+次に右腕の動作計画を行い,その結果のログを表示します.
+
+```python
+ plan = group.plan()
+ rospy.loginfo("plan is {}".format(plan))
+```
+
+そして動作計画を実行して,その結果のログを表示します.
+
+```python
+ ret = group.go()
+ rospy.loginfo("executed ... {}".format(ret))
+```
+
+それでは実際に ar_demo.py を実行してみます.
+
+```python
+$ rosrun nextage_ros_bridge ar_demo.py
+```
+
+コンソールに黄色い文字でワーニングが表示されている場合は座標の変換が完遂できていない場合です.
+白い文字で座標変換ができている旨のメッセージが出ているときに Enter キーを押すことにより
+AR 認識で得られた座標データから右手の目標姿勢を定めて動作計画を行い AR マーカの上まで移動させます.
+
+
+### Gazebo での AR マーカ認識シミュレーション
+
+Gazebo を用いて仮想空間内の AR マーカを認識するシミュレーションを行います.
+ここでは頭部カメラの画像を AR マーカ認識に使用します.
+
+#### Gazebo の起動とモデルの読み込み
+
+NEXTAGE OPEN の Gazebo シミュレーションを起動します.
+
+- メモ: ROS / Gazebo でのシミュレーションのため rtm_ros_bridge は不要
+
+```
+$ roslaunch nextage_gazebo nextage_world.launch
+```
+
+Gazebo の仮想空間内に次の2つのモデルを読み込みます.
+
+ - Cafe table
+ - MarkerBox-60mm
+
+"cafe_table" モデルを Gazebo のライブラリから読み込みます.
+
+1. 左コラムの Insert タブを選択
+2. “http://gazeboism.org/models/” を選択して “Cafe table” をクリック
+3. ポインタに Cafe table がついてくるのでロボットの前の床でクリックして設置
+4. 上の方にある十字の矢印アイコンボタンをクリック後 Cafe table をクリック
+5. 赤緑青の座標軸をドラッグして Cafe table の位置を調整
+
+
+- メモ: Gazebo 起動直後は "http://gazeboism.org/models" が表示されずに
+ "Connecting to model database..." になっているかもしれません.
+ しばらくするとデータベースにつながってモデルが読めるようになります.
+
+
+
+"MarkerBox-60mm" モデルは Gazebo のライブラリに登録されていないので
+ユーザコンピュータの `~/.gazebo/model/` ディレクトリにモデルフォルダをコピーします.
+ターミナルなどを使用してコピーしてください.
+
+```
+$ cp -r MarkerBox-60mm/ ~/.gazebo/model/
+```
+
+- AR マーカモデルフォルダ
+ - /opt/ros/indigo/nextage_gazebo/models/MarkerBox-60mm
+ - もしくは Catkin ワークスペース内 CATKIN_WORKSPACE/src/rtmros_nextage/nextage_gazebo/models/MarkerBox-60mm
+ - ソースURL: https://github.com/tork-a/rtmros_nextage/blob/indigo-devel/nextage_gazebo/models/MarkerBox-60mm
+
+コピーしたモデル MarkerBox-60mm を Gazebo に読み込みます.
+
+1. 左コラムの Insert タブを選択
+2. “/home/USERNAME/.gazebo/models” を選択して “MarkerBox-60mm” をクリック
+3. ポインタを動かしてモデルを Cafe table の下の床の上でクリックして設置
+4. 上の方にある十字の矢印アイコンボタンをクリックモデルをクリック
+5. 赤緑青の座標軸をドラッグして Cafe table 上で,
+ロボット頭部カメラを下に向けたときに写りそうな位置に調整
+
+
+
+カメラの画角に AR マーカが入るように頭部姿勢を動かします.
+ここでは rqt の Joint Trajectory Controller プラグインを利用します.
+
+```
+$ rqt
+```
+
+Plugins の Robot Tools 内 Joint trajectory controller を選択します.
+
+
+
+Joint trajectory controller 内で下記のように設定します.
+
+- controller manager ns : /controller_manager
+- controller : head_controller
+
+Enable/disable ボタンをクリックして緑色になると頭部の各関節を動かせる状態になります.
+joints 下の各スライダを動かして頭部の姿勢を調整してください.
+
+
+
+
+#### AR プロセスと MoveIt! の起動
+
+新しいターミナルで AR マーカの認識プログラムを起動します.
+
+```
+$ roslaunch nextage_ros_bridge ar_headcamera.launch sim:=true
+```
+
+ar_headcamera.launch
+```xml
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+```
+
+あとはロボット実機で行った場合と同様に MoveIt! と ar_demo.py を実行します.
+
+1. MoveIt! を起動 + (オプション)RViz 設定ファイルの読み込み
+2. ar_demo.py の実行
+
+を行います.
+
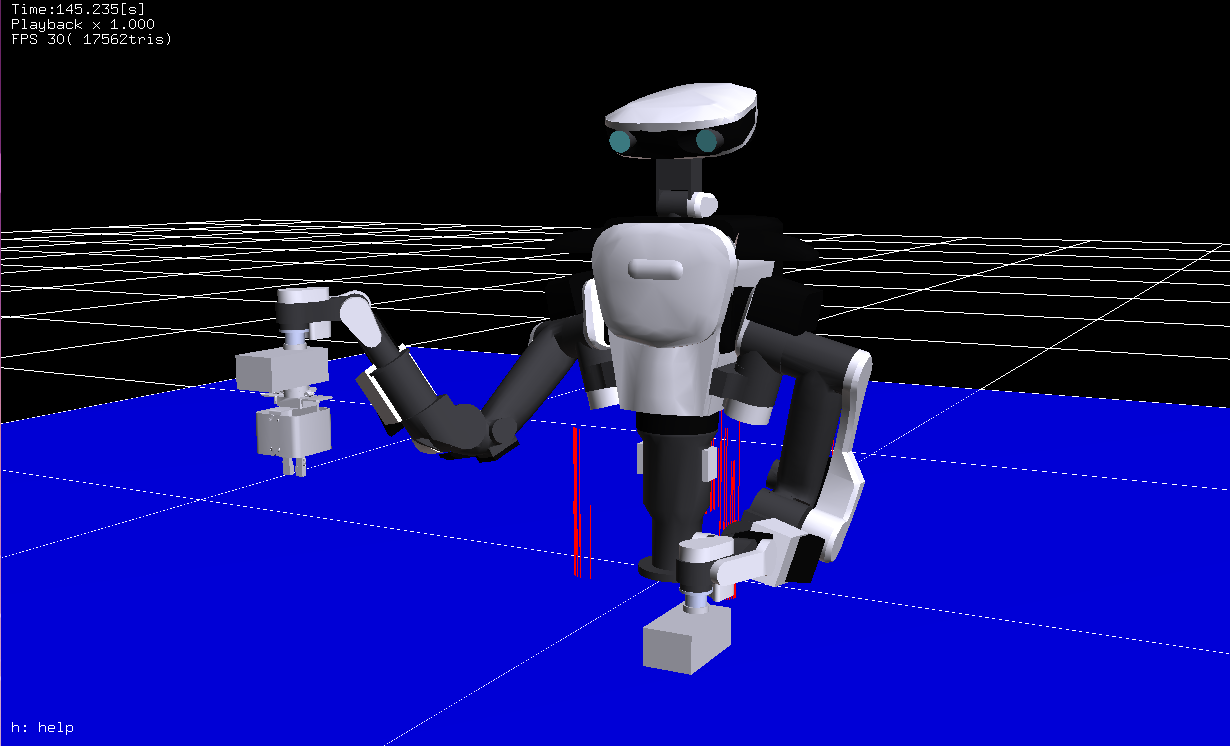
+MoveIt! - ar_demo.py 実行前
+
+
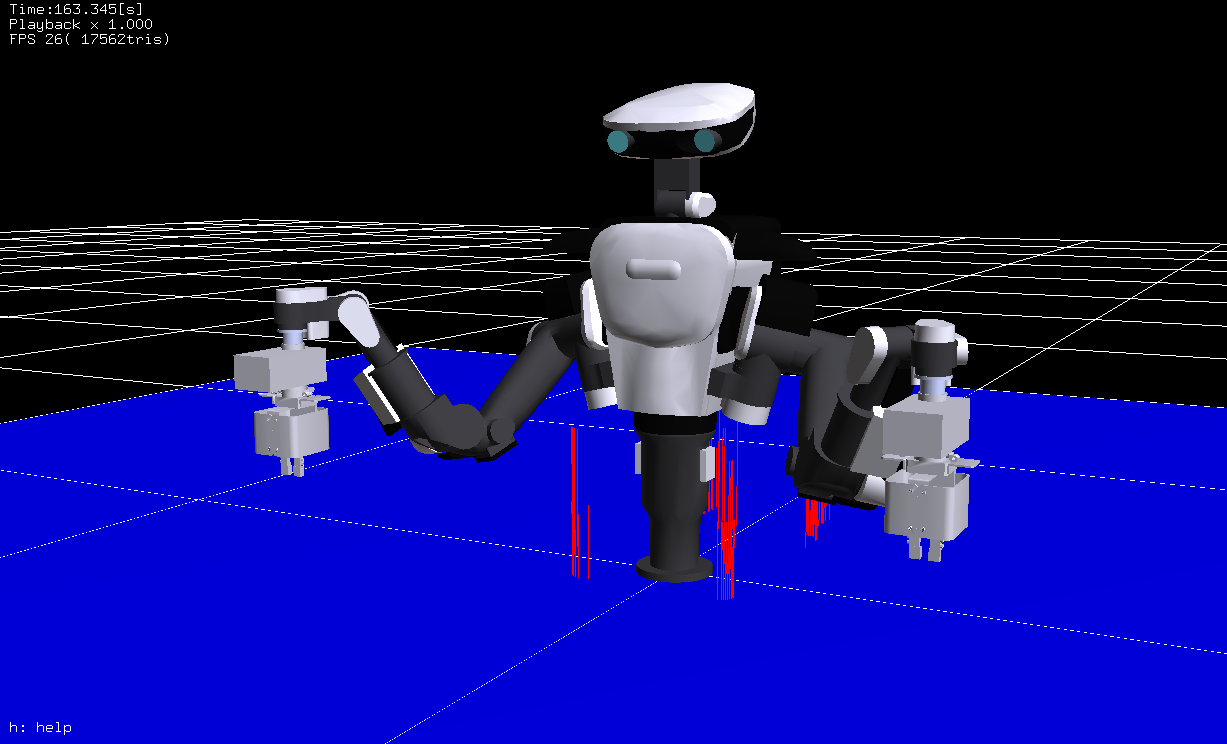
+MoveIt! - ar_demo.py 実行後
+
+
+Gazebo - ar_demo.py 実行後
+
+
+
+
diff --git a/doc/manual_ja_tutorial_3d-perception_xtion-kinect.md b/doc/manual_ja_tutorial_3d-perception_xtion-kinect.md
new file mode 100644
index 00000000..58ca7f81
--- /dev/null
+++ b/doc/manual_ja_tutorial_3d-perception_xtion-kinect.md
@@ -0,0 +1,262 @@
+
+## Xtion/Kinect カメラの TF キャリブレーション
+
+3次元深度カメラの Xtion や Kinect を利用してロボット環境情報を取得する場合において,
+得られた環境空間情報とロボットとの相対位置・姿勢が分らなければ意味がありません.
+
+そのためにはカメラがロボットに対してどのような位置・姿勢で設置されているかを知る必要があります.
+具体的にはカメラを設置するリンクもしくはワールド空間に対するカメラの TF を取得します.
+
+
+### ロボット実機での Xtion/Kinect TF キャリブレーション
+
+#### ロボットの準備
+
+ROS を使用するので rtm_ros_bridge が起動している必要があります.
+
+```
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME%
+```
+
+ロボット各関節のキャリブレーションを行います.
+関節のキャリブレーションが終わったら一旦ロボットの姿勢を終了姿勢にしてサーボを切ります.
+
+ここでは操作に iPython コンソールを使用しています.
+
+```
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --host nextage
+
+:
+(many connection messages)
+:
+
+[hrpsys.py] initialized successfully
+
+:
+
+In [1]: robot.checkEncoders()
+In [2]: robot.goOffPose()
+In [3]: robot.servoOff()
+```
+
+#### チェッカーボードのロボットへの設置
+
+カメラとロボットの相対位置・姿勢を定めるためにチェッカーボードをロボットに取り付けます.
+このときチェッカーボードと設置するロボットのリンクとの相対位置は機械設計上既知である必要があります.
+
+- 注意: ロボット実機への作業ですのでサーボが切れていることを確認してください.
+
+下図のように胸部チェッカーボードもしくは腰部チェッカーボードをロボットに取り付けてください.
+
+胸部チェッカーボード
+
+
+
+腰部チェッカーボード
+
+
+
+#### サーボを入れる(胸部チェッカーボードの場合)
+
+胸部チェッカーボードを使用する場合は CHEST_JOINT0 の関節角度を
+0 deg(正面)で維持する必要がありますので,ロボットのサーボを入れて初期姿勢にします.
+
+```
+In [1]: robot.servoOn()
+In [2]: robot.goInitial()
+```
+
+#### Xtion/Kinect カメラをチェッカーボードに向ける
+
+Xtion/Kinect カメラにチェッカーボードが映るようにします.
+頭部に Xtion/Kinect カメラを設置した場合には関節を制御して頭部姿勢を変えます.
+
+下に頭部関節を動作・制御するコマンドを記します.
+
+```
+In [1]: robot.setJointAnglesOfGroup( 'head', [ 0.0, 45.0 ], 5.0 )
+In [2]: robot.getJointAngles()
+```
+
+#### チェッカーボード検出プログラムの実行
+
+Xtion/Kinect カメラを本作業を行っている UIコントロールボックス(Ubuntu PC/Vision PC)
+もしくは 開発用コンピュータ(Ubuntu)に接続してください.
+
+チェッカーボードを検出プログラムを実行します.
+Kinect カメラを使用している場合は実行時に引数 `launch_openni2:=false` を指定してください.
+
+Xtion カメラの場合
+```
+$ roslaunch nextage_calibration camera_checkerboard_chest.launch #chest
+or
+$ roslaunch nextage_calibration camera_checkerboard_waist.launch #waist
+```
+
+Kinect カメラの場合
+```
+$ roslaunch nextage_calibration camera_checkerboard_chest.launch launch_openni2:=false #chest
+or
+$ roslaunch nextage_calibration camera_checkerboard_waist.launch launch_openni2:=false #waist
+```
+
+Checkerboard Detector - 胸部チェッカーボード
+
+
+Checkerboard Detector - 腰部チェッカーボード
+
+
+#### RViz の起動
+
+各機能の実行状況を確認するために RViz を起動します.
+
+```
+$ rviz -d `rospack find nextage_calibration`/conf/calibration.rviz
+```
+
+RViz - 胸部チェッカーボード
+
+
+RViz - 腰部チェッカーボード
+
+
+#### カメラリンクと親リンクの TF の取得
+
+`tf_echo` コマンドを利用して camera_link から親リンクへの TF を取得します.
+ここでは camera_link から HEAD_JOINT1 への TF を表示します.
+
+```
+$ rosrun tf tf_echo HEAD_JOINT1_Link camera_link
+```
+
+`tf_echo` の結果の例
+```
+At time 93.641
+- Translation: [0.101, -0.014, 0.199]
+- Rotation: in Quaternion [-0.001, 0.704, 0.002, 0.710]
+ in RPY (radian) [0.126, 1.563, 0.130]
+ in RPY (degree) [7.223, 89.561, 7.477]
+```
+
+#### ロボットでの作業の終了
+
+カメラリンクと親リンクの TF の取得ができたらロボットを終了姿勢にしてサーボを切ります.
+
+```
+In [1]: robot.goOffPose()
+In [2]: robot.servoOff()
+```
+
+#### 全ノードの終了
+
+ロボットのサーボが切れたら全てのノードを Ctrl-C で終了します.
+
+#### カメラリンク TF の適用
+
+取得した Xtion/Kinect カメラ TF をロボット上のカメラのパラメータとして適用します.
+適用は Xtion/Kinect カメラモジュール xtion_kinect.launch 起動時に引数として渡して行います.
+
+- 単位系
+ - TF_COORD_XYZ : [m]
+ - TF_COORD_RPY : [rad]
+
+まず rtm_ros_bridge を起動します.
+
+```
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME%
+```
+
+Xtion カメラの場合
+
+```
+$ roslaunch nextage_calibration xtion_kinect.launch TF_COORD_XYZ:='0.101 -0.014 0.199' TF_COORD_RPY:='0.126 1.563 0.130'
+```
+
+Kinect カメラの場合(`launch_openni2:=false` のみの違い)
+
+```
+$ roslaunch nextage_calibration xtion_kinect.launch TF_COORD_XYZ:='0.101 -0.014 0.199' TF_COORD_RPY:='0.126 1.563 0.130' launch_openni2:=false
+```
+
+#### Xtion カメラの画像キャリブレーション(オプション)
+
+Xtion カメラにおいては画像のキャリブレーション情報を取得しておくことをお勧めします.
+画像キャリブレーションの作業手順は下記のサイトを参照ください.
+
+- ROS Wiki - How to Calibrate a Monocular Camera
+ - http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration
+
+
+### Gazebo を用いた Xtion/Kinect TF 取得シミュレーション
+
+実機で行う Xtion/Kinect カメラの TF キャリブレーションの作業は
+Gazebo シミュレータ上でも同様のことを行うことができます.
+
+
+#### Gazebo の起動
+
+NEXTAGE OPEN ロボットモデルの Gazebo シミュレータを起動します.
+
+```
+$ roslaunch nextage_gazebo nextage_world.launch
+```
+
+- メモ: ROS / Gazebo でのシミュレーションのため rtm_ros_bridge は不要
+
+#### Gazebo 内での Kinect とチェッカーボードモデルの設置
+
+Gazebo 起動後の NEXTAGE OPEN ロボットの初期動作が終了しましたら,
+Kinect と チェッカーボード のモデルを Gazebo 内に設置します.
+
+```
+$ roslaunch nextage_calibration gazebo_kinect_checkerboard_chest.launch #chest
+or
+$ roslaunch nextage_calibration gazebo_kinect_checkerboard_waist.launch #waist
+```
+
+Gazebo シミュレータ内の Kinect と胸部チェッカーボードモデルの設置
+
+
+#### チェッカーボード検出プログラムの実行
+
+実機ロボットの場合と同様に Xtion/Kinect カメラでのチェッカーボード検出プログラムを実行します.
+
+Kinect の場合
+
+```
+$ roslaunch nextage_calibration camera_checkerboard_chest.launch launch_openni2:=false
+or
+$ roslaunch nextage_calibration camera_checkerboard_waist.launch launch_openni2:=false
+```
+
+
+
+#### RViz の起動
+
+実機ロボットの場合と同様に各種チェックのために RViz を起動します.
+
+```
+$ rviz -d `rospack find nextage_calibration`/conf/calibration.rviz
+```
+
+
+
+#### カメラリンクと親リンクの TF の取得
+
+実機ロボットの場合と同様に camera_link から親リンクへの TF を取得します.
+
+```
+$ rosrun tf tf_echo HEAD_JOINT1_Link camera_link
+```
+
+`tf_echo` の結果の例
+```
+At time 93.641
+- Translation: [0.101, -0.014, 0.199]
+- Rotation: in Quaternion [-0.001, 0.704, 0.002, 0.710]
+ in RPY (radian) [0.126, 1.563, 0.130]
+ in RPY (degree) [7.223, 89.561, 7.477]
+```
+
+
+
diff --git a/doc/manual_ja_tutorial_moveit-gui.md b/doc/manual_ja_tutorial_moveit-gui.md
new file mode 100644
index 00000000..d5fc1718
--- /dev/null
+++ b/doc/manual_ja_tutorial_moveit-gui.md
@@ -0,0 +1,203 @@
+
+# チュートリアル: MoveIt! GUI
+
+## MoveIt! - ROS の動作計画ソフトウェア
+
+ROS の動作計画アプリケーションの代表的なソフトウェアパッケージが MoveIt! です.
+HIRO / NEXTAGE OPEN においても rtm_ros_bridge があるので
+MoveIt! の動作計画機能を利用することができます.
+
+
+## MoveIt! GUI の操作
+
+基本的な操作は "クイックスタート" の "MoveIt! での動作の実行" を参照してください.
+
+#### 左腕・両腕の動作計画への切り替え
+
+HIRO / NEXTAGE OPEN において MoveIt! を起動したときは
+デフォルトで右手の InteractiveMarker が操作できる状態になっています.
+これを左手を操作して左腕の動作計画を作成するには次の手順にて MoveIt! の設定を変更します.
+
+1. 子ウィンドウ Displays 内の MotionPlanning → Plannning Request → Planning Group で left_arm を選択
+2. 右手と同様に InteractiveMarker を操作して [ Plan and Execute ]
+
+
+
+HIRO / NEXTAGE OPEN の MoveIt! では両腕での動作計画もできます.
+MoveIt! の GUI: RViz 上では 次のように選択します.
+
+1. Displays 内の MotionPlanning → Plannning Request → Planning Group で botharms を選択
+2. 各腕の InteractiveMarker を操作して [ Plan and Execute ]
+
+
+
+#### 動作計画のループアニメーションと軌跡の表示
+
+MoveIt! にて動作計画が作成されたときにはその動作アニメーションが1度表示されます.
+動作計画をより確認しやすくするためにその動作アニメーションを繰り返し表示や
+その軌跡表示をすることができます.
+
+次の手順で MoveIt! の設定を変更します.
+
+1. 子ウィンドウ Displays 内の MotionPlanning → Planning Path → Loop Animation のチェックボックスを ON
+2. Loop Animation のすぐ下にある Show Trail のチェックボックスを ON
+
+MoveIt! でのアニメーションと軌跡の表示の様子(画像はアニメーションの途中をキャプチャ)
+
+
+#### 動作計画上の各経過姿勢の確認
+
+ループアニメーションでは確認しづらい動作計画上の任意の経過点の姿勢を確認するには
+MotionPlanning - Slider を使います.
+
+1. MoveIt! のメニュー Panels 内の MotionPlanning - Slider を選択
+2. 動作計画を作成した後にスライダを操作して経過点の姿勢を表示
+
+
+
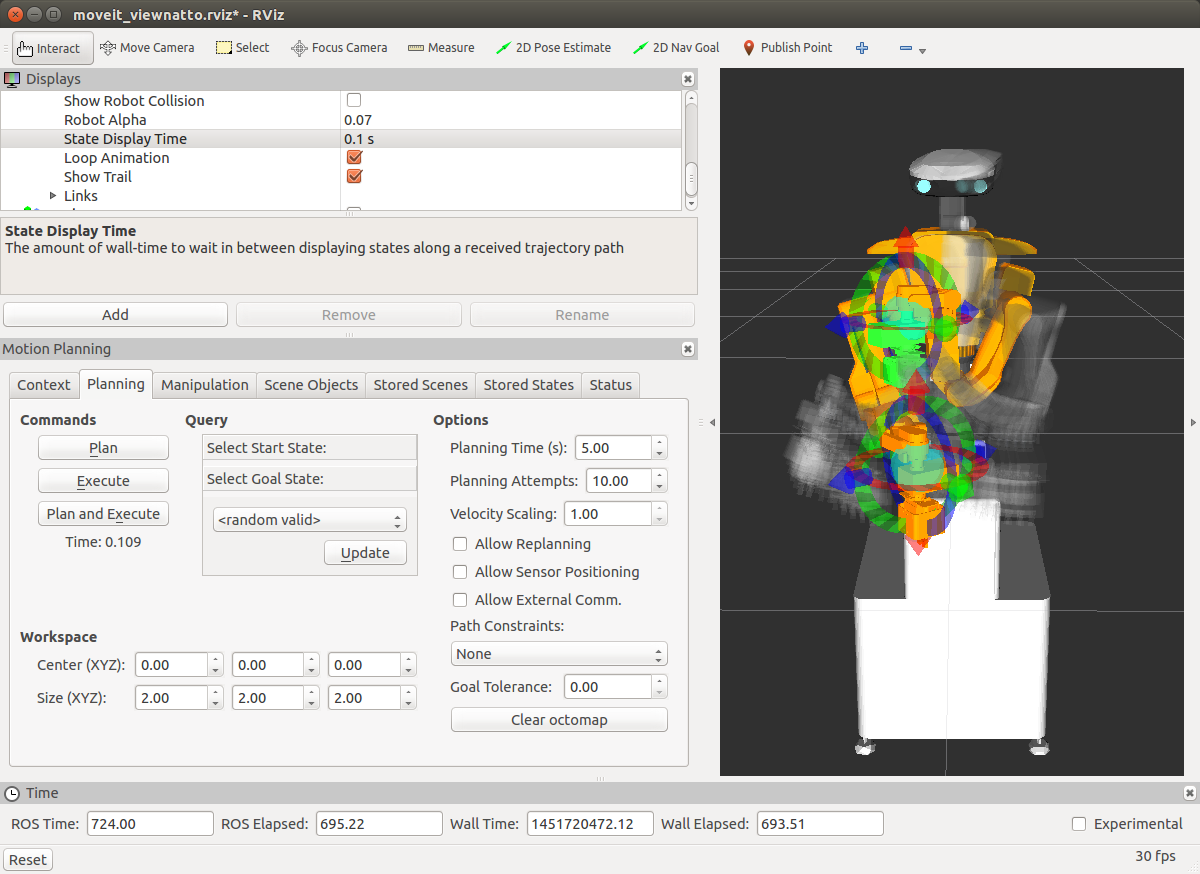
+#### 実行動作の速度・加速度の調整
+
+MotionPlanning 内 Planning タブにある Options の
+
+- Velocity Scalling: 1.00
+- Acceleration Scalling: 1.00
+
+の値を 0〜1 の間で変更して動作の実行速度と加速度をそれぞれ動的に変更することができます.
+
+
+
+#### 逆運動学解のない姿勢での最善解の利用
+
+デフォルトの設定では逆運動学解のない姿勢まで InteractiveMarker を動かすと
+エンドエフェクタ(手先など)は解の存在するところで止まってしまいます.
+
+MotionPlanning 子ウィンドウの Context タブ内の Kinematics 下
+Allow Approximate IK Solutions のチェックを入れると,
+厳密に逆運動学解がない姿勢でもそれに近い最善の解が利用されます.
+
+
+
+#### ジョイスティクの利用
+
+HIRO / NEXTAGE OPEN にてジョイスティックを利用するためには
+moveit_ros_visualization パッケージがインストールされてる必要があります.
+
+moveit_ros_visualization パッケージがインストールされていない場合には
+下記手順によりインストールしてください.
+```
+$ sudo apt-get install ros-indigo-moveit-ros-visualization
+OR
+$ sudo apt-get install ros-indigo-moveit # This is simpler and better
+```
+
+ジョイスティックのプロセスを起動するには次のコマンドを実行してください.
+
+```
+$ roslaunch hironx_moveit_config joystick_control.launch
+OR
+$ roslaunch nextage_moveit_config joystick_control.launch
+```
+
+#### NEXTAGE OPEN での IKFast の利用
+
+NEXTAGE_OPEN では IKFast パッケージを利用することができます.
+MoveIt! を実行するときに引数として運動学の設定を IKFast を利用するように指定します.
+
+```
+$ roslaunch nextage_moveit_config moveit_planning_execution.launch kinematics_conf:=`rospack find nextage_moveit_config`/config/kinematics_ikfast.yaml
+```
+
+## MoveIt! GUI での障害物を回避する動作計画
+
+MoveIt! の最大の特徴の1つは障害物を回避するような動作が自動生成されるところにあります.
+
+### 障害物モデルデータを利用した MoveIt! の動作計画
+
+環境が既知とした場合に
+障害物の 3D モデルデータのファイルを MoveIt! に読み込んで動作計画を行う方法を紹介します.
+
+#### 障害物モデルのシーンファイルの読み込み
+
+MoveIt! 内に次の手順により障害物モデルファイルの読込みを行います.
+
+1. MotionPlanning 内 Scene Objects タブで [ Import From Text ] ボタンをクリック
+2. ファイル nxo_pillar.scene を選択して [ OK ] をクリック
+3. 必要であれば障害物の InteractiveMarker を操作してロボットの手の近くに移動
+4. Context タブで [ Publish Current Scene ] をクリック → 障害物がシーンに反映
+
+
+- 障害物モデルファイル
+ - /opt/ros/indigo/nextage_moveit_config/models/nxo_pillar.scene
+ - もしくは Catkin ワークスペース内 CATKIN_WORKSPACE/src/rtmros_nextage/nextage_moveit_config/models/nxo_pillar.scene
+ - ソースURL: https://github.com/tork-a/rtmros_nextage/blob/indigo-devel/nextage_moveit_config/models/nxo_pillar.scene
+
+Import From Text
+
+
+Publish Current Scene
+
+
+シーンファイル nxo_pillar.scene の内容
+
+```
+nxo_pillar
+* nxo_pillar
+1
+box
+0.1 0.1 1.1
+0.4 -0.2 -0.42
+0 0 0 1
+0 0 0 0
+.
+```
+
+#### 障害物を回避する動作計画とその実行
+
+読み込んだ障害物モデルのある環境に応じた動作計画を行ってロボットを動かします.
+
+障害物を回避する経路は自動的に生成されるので,動作計画を行う操作は障害物が無い場合と同じです.
+次の操作で障害物を回避したモーションが自動生成されてロボットにその動作が出力されます.
+
+- 注意: ロボットが動きます.
+
+
+1. Planning タブ Querry の Select Start State: < current > で [ Update ] ボタンをクリック
+2. Planning タブ Querry の Select Goal State: < current > で [ Update ] ボタンをクリック
+3. MoveIt! 上の InteractiveMarker でロボットの手を現在の位置から障害物の反対側にドラッグ
+4. Planning タブ Commands の [ Plan and Execute ] ボタンをクリック
+
+
+障害物を回避する動作計画の例
+
+
+障害物が無い場合の動作計画の例
+
+
+
+#### STL / COLLADA(DAE) モデルファイルの利用
+
+MoveIt! には STL や COLLADA(DAE) モデルのファイルを直接読み込む機能もあります.
+MoveIt! 内に次の手順により障害物モデルファイルの読込みを行います.
+
+1. MotionPlanning 内 Scene Objects タブで [ Import File ] ボタンをクリック
+2. ファイル tsubo.dae もしくは tsubo.stl を選択して [ OK ] をクリック
+3. 必要であれば障害物の InteractiveMarker を操作してロボットの手の近くに移動
+4. Context タブで [ Publish Current Scene ] をクリック → 障害物がシーンに反映
+
+
+- STL / COLLADA モデルファイル
+ - /opt/ros/indigo/nextage_moveit_config/models/
+ - もしくは Catkin ワークスペース内 CATKIN_WORKSPACE/src/rtmros_nextage/nextage_moveit_config/models/tsubo.*
+ - ソースURL: https://github.com/tork-a/rtmros_nextage/blob/indigo-devel/nextage_moveit_config/models/tubo.stl OR tsubo.dae
+
+
+
+STL / COLLADA(DAE) モデルファイルを用いた場合も
+シーンファイルを読み込んだ場合と同じ手順で
+MoveIt! で障害物を回避する動作計画を作成できます.
+
+Motion Planning - tsubo.dae
+
+
+
+
diff --git a/doc/manual_ja_tutorial_moveit-python.md b/doc/manual_ja_tutorial_moveit-python.md
new file mode 100644
index 00000000..28bf92bb
--- /dev/null
+++ b/doc/manual_ja_tutorial_moveit-python.md
@@ -0,0 +1,520 @@
+
+# チュートリアル: MoveIt! Python インタフェース
+
+## MoveIt! Commander
+
+MoveIt! の動作計画などの機能は GUI(RViz)からの操作を提供しているだけではありません.
+そのプログラミングインタフェースである MoveIt! Commander も提供されていますので,
+プログラミング言語から MoveIt! の機能を利用してロボットを動かすこともできます.
+
+## MoveIt! Python インタフェース使用環境
+
+MoveIt! の Python インタフェース MoveIt! Python Commander を使用するときの環境は次のようになっています.
+
+- rtm_ros_hironx: バージョン 1.1.4 以降( Hironx/Nextage Open )
+- 推奨プログラミングインタフェース: `ROS_Client`( RobotCommander から派生 )
+- RobotCommander は MoveIt! の Python プログラミングインターフェス
+
+MoveIt! の Python インタフェースである moveit_commander パッケージが
+Ubuntu コンピュータ上にない場合はインストールする必要があります.
+
+```
+$ sudo apt-get install ros-%YOUR_ROS_DISTRO%-moveit-commander
+```
+
+## MoveIt! Python インタフェースからのロボット操作
+
+### MoveIt! Python インタフェースの起動
+
+#### rtm_ros_bridge の実行
+
+rtm_ros_bridge を実行します.
+
+```
+$ roslaunch hironx_ros_bridge hironx_ros_bridge_real.launch nameserver:=%HOSTNAME% (Hironx)
+
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME% (NEXTAGE OPEN)
+```
+
+#### MoveIt! サーバの起動
+
+`ROS_Client` クラスをベースにしたプログラムを実行するためには
+その "クライアント" に対する "サーバ" として MoveIt! のノードが走っている必要があります.
+
+MoveIt! を起動します.
+
+```
+$ roslaunch hironx_moveit_config moveit_planning_execution.launch (HIRO)
+
+$ roslaunch nextage_moveit_config moveit_planning_execution.launch (NEXTAGE OPEN)
+```
+
+
+### Python での MoveIt! Commander を用いたロボット操作
+
+Python から MoveIt! Commander を利用しているサンプルプログラムで,
+HIRO / NEXTAGE OPEN ロボットをどのように動作させているのかを見てみます.
+
+- https://github.com/tork-a/rtmros_nextage/blob/indigo-devel/nextage_ros_bridge/script/nextage_moveit_sample.py
+
+
+
+サンプルコード全体を下に記載します.その後に各行について何をしているのかを見てみます.
+
+```python
+1 #!/usr/bin/env python
+2 ##########################################
+3 # @file nextage_moveit_sample.py #
+4 # @brief Nextage Move it demo program #
+5 # @author Ryu Yamamoto #
+6 # @date 2015/05/26 #
+7 ##########################################
+8 import moveit_commander
+9 import rospy
+10 import geometry_msgs.msg
+11
+12 def main():
+13 rospy.init_node("moveit_command_sender")
+14
+15 robot = moveit_commander.RobotCommander()
+16
+17 print "=" * 10, " Robot Groups:"
+18 print robot.get_group_names()
+19
+20 print "=" * 10, " Printing robot state"
+21 print robot.get_current_state()
+22 print "=" * 10
+23
+24 rarm = moveit_commander.MoveGroupCommander("right_arm")
+25 larm = moveit_commander.MoveGroupCommander("left_arm")
+26
+27 print "=" * 15, " Right arm ", "=" * 15
+28 print "=" * 10, " Reference frame: %s" % rarm.get_planning_frame()
+29 print "=" * 10, " Reference frame: %s" % rarm.get_end_effector_link()
+30
+31 print "=" * 15, " Left ight arm ", "=" * 15
+32 print "=" * 10, " Reference frame: %s" % larm.get_planning_frame()
+33 print "=" * 10, " Reference frame: %s" % larm.get_end_effector_link()
+34
+35 #Right Arm Initial Pose
+36 rarm_initial_pose = rarm.get_current_pose().pose
+37 print "=" * 10, " Printing Right Hand initial pose: "
+38 print rarm_initial_pose
+39
+40 #Light Arm Initial Pose
+41 larm_initial_pose = larm.get_current_pose().pose
+42 print "=" * 10, " Printing Left Hand initial pose: "
+43 print larm_initial_pose
+44
+45 target_pose_r = geometry_msgs.msg.Pose()
+46 target_pose_r.position.x = 0.325471850974-0.01
+47 target_pose_r.position.y = -0.182271241593-0.3
+48 target_pose_r.position.z = 0.0676272396419+0.3
+49 target_pose_r.orientation.x = -0.000556712307053
+50 target_pose_r.orientation.y = -0.706576742941
+51 target_pose_r.orientation.z = -0.00102461782513
+52 target_pose_r.orientation.w = 0.707635461636
+53 rarm.set_pose_target(target_pose_r)
+54
+55 print "=" * 10," plan1 ..."
+56 rarm.go()
+57 rospy.sleep(1)
+58
+59 target_pose_l = [
+60 target_pose_r.position.x,
+61 -target_pose_r.position.y,
+62 target_pose_r.position.z,
+63 target_pose_r.orientation.x,
+64 target_pose_r.orientation.y,
+65 target_pose_r.orientation.z,
+66 target_pose_r.orientation.w
+67 ]
+68 larm.set_pose_target(target_pose_l)
+69
+70 print "=" * 10," plan2 ..."
+71 larm.go()
+72 rospy.sleep(1)
+73
+74 #Clear pose
+75 rarm.clear_pose_targets()
+76
+77 #Right Hand
+78 target_pose_r.position.x = 0.221486843301
+79 target_pose_r.position.y = -0.0746407547512
+80 target_pose_r.position.z = 0.642545484602
+81 target_pose_r.orientation.x = 0.0669013615474
+82 target_pose_r.orientation.y = -0.993519060661
+83 target_pose_r.orientation.z = 0.00834224628291
+84 target_pose_r.orientation.w = 0.0915122442864
+85 rarm.set_pose_target(target_pose_r)
+86
+87 print "=" * 10, " plan3..."
+88 rarm.go()
+89 rospy.sleep(1)
+90
+91 print "=" * 10,"Initial pose ..."
+92 rarm.set_pose_target(rarm_initial_pose)
+93 larm.set_pose_target(larm_initial_pose)
+94 rarm.go()
+95 larm.go()
+96 rospy.sleep(2)
+97
+98 if __name__ == '__main__':
+99 try:
+100 main()
+101 except rospy.ROSInterruptException:
+102 pass
+```
+
+このように動作計画と実行を行う Python スクリプトの主要な部分は
+
+1. エンドエフェクタのリンクの位置と姿勢をターゲットとして指定
+2. ターゲットの姿勢まで動作させる
+
+という手順になります.
+また,そのための準備としてエンドエフェクタの姿勢などを取得しています.
+
+Python スクリプトの各行を具体的に見ていきます.
+
+MoveIt! の Python インタフェース は
+`moveit_commander.MoveGroupCommander` で提供されます.
+
+```python
+import moveit_commander
+import rospy
+import geometry_msgs.msg
+```
+
+この Python スクリプトから `MoveGroupCommander` を使うために
+`rospy.init_node()` を呼び出して ROS ノードを実行します.
+
+```python
+rospy.init_node("moveit_command_sender")
+```
+
+RobotCommander をインスタンス化します.
+
+```python
+robot = moveit_commander.RobotCommander()
+```
+
+ロボットの全ての Group の名前のリストを取得,表示します.
+
+```python
+print "=" * 10, " Robot Groups:"
+print robot.get_group_names()
+```
+
+ロボット全体の状態を表示するとデバッグに役立ちます.
+
+```python
+print "=" * 10, " Printing robot state"
+print robot.get_current_state()
+```
+
+現在のロボットの各腕の姿勢を取得します.
+
+```python
+rarm_current_pose = rarm.get_current_pose().pose
+larm_current_pose = larm.get_current_pose().pose
+```
+
+初期姿勢オブジェクトに現在のロボットの各腕の姿勢を代入します.
+
+```python
+rarm_initial_pose = rarm.get_current_pose().pose
+print "=" * 10, " Printing Right Hand initial pose: "
+print rarm_initial_pose
+
+larm_initial_pose = larm.get_current_pose().pose
+print "=" * 10, " Printing Left Hand initial pose: "
+print larm_initial_pose
+```
+
+動作計画を行いロボットを動作させます.
+
+**Execution Plan 1**
+
+```python
+target_pose_r = geometry_msgs.msg.Pose()
+target_pose_r.position.x = 0.325471850974-0.01
+target_pose_r.position.y = -0.182271241593-0.3
+target_pose_r.position.z = 0.0676272396419+0.3
+target_pose_r.orientation.x = -0.000556712307053
+target_pose_r.orientation.y = -0.706576742941
+target_pose_r.orientation.z = -0.00102461782513
+target_pose_r.orientation.w = 0.707635461636
+rarm.set_pose_target(target_pose_r)
+
+print "=" * 10," plan1 ..."
+rarm.go()
+rospy.sleep(1)
+```
+
+
+
+
+**Execution Plan 2**
+
+```python
+target_pose_l = [
+ target_pose_r.position.x,
+ -target_pose_r.position.y,
+ target_pose_r.position.z,
+ target_pose_r.orientation.x,
+ target_pose_r.orientation.y,
+ target_pose_r.orientation.z,
+ target_pose_r.orientation.w
+]
+larm.set_pose_target(target_pose_l)
+
+print "=" * 10," plan2 ..."
+larm.go()
+rospy.sleep(1)
+```
+
+
+
+
+**Execution Plan 3**
+
+```python
+rarm.clear_pose_targets()
+
+#Right Hand
+target_pose_r.position.x = 0.221486843301
+target_pose_r.position.y = -0.0746407547512
+target_pose_r.position.z = 0.642545484602
+target_pose_r.orientation.x = 0.0669013615474
+target_pose_r.orientation.y = -0.993519060661
+target_pose_r.orientation.z = 0.00834224628291
+target_pose_r.orientation.w = 0.0915122442864
+rarm.set_pose_target(target_pose_r)
+
+print "=" * 10, " plan3..."
+rarm.go()
+rospy.sleep(1)
+```
+
+
+
+
+**Go Initial**
+
+```python
+print "=" * 10,"Initial pose ..."
+rarm.set_pose_target(rarm_initial_pose)
+larm.set_pose_target(larm_initial_pose)
+rarm.go()
+larm.go()
+rospy.sleep(2)
+```
+
+
+
+動画: "Nextage Move it! demo" https://www.youtube.com/watch?v=heKEKg3I7cQ
+
+また,MoveIt! を表示している RViz 上でもこれらの動作計画が表示されます.
+
+実際にサンプルプログラムを実行して,
+HIRO / NEXTAGE OPEN ロボットが動作計画どおりに動いているかを見てみます.
+
+- 注意: ロボットが動きます.
+
+ターミナルから次のコマンドを実行してサンプルプログラムを実行します.
+
+```
+$ rosrun nextage_ros_bridge nextage_moveit_sample.py (NEXTAGE OPEN)
+```
+
+MoveIt! Commander では更に様々なメソッドがありますので
+ROS Wiki の moveit_commander のページを見てください.
+
+- ROS Wiki - moveit_commander
+ - http://wiki.ros.org/moveit_commander
+
+
+## MoveIt! Python インタフェースでの両腕の動作計画
+
+MoveIt! Python インタフェースでの両腕の動作計画を利用したサンプルコードを下記に記します.
+
+両腕での動作計画サンプルコード
+
+```python
+import moveit_commander
+import rospy
+from geometry_msgs.msg import Pose
+
+def main():
+ rospy.init_node("moveit_command_sender")
+
+ botharms = moveit_commander.MoveGroupCommander("botharms")
+
+ target_pose_r = Pose()
+ target_pose_l = Pose()
+ q = quaternion_from_euler(0, -math.pi/2,0)
+ target_pose_r.position.x = 0.3
+ target_pose_r.position.y = 0.1
+ target_pose_r.position.z = 0.0
+ target_pose_r.orientation.x = q[0]
+ target_pose_r.orientation.y = q[1]
+ target_pose_r.orientation.z = q[2]
+ target_pose_r.orientation.w = q[3]
+ target_pose_l.position.x = 0.3
+ target_pose_l.position.y =-0.1
+ target_pose_l.position.z = 0.3
+ target_pose_l.orientation.x = q[0]
+ target_pose_l.orientation.y = q[1]
+ target_pose_l.orientation.z = q[2]
+ target_pose_l.orientation.w = q[3]
+ botharms.set_pose_target(target_pose_r, 'RARM_JOINT5_Link')
+ botharms.set_pose_target(target_pose_l, 'LARM_JOINT5_Link')
+ botharms.go()
+ rospy.sleep(1)
+
+ target_pose_r.position.x = 0.3
+ target_pose_r.position.y =-0.2
+ target_pose_r.position.z = 0.0
+ target_pose_l.position.x = 0.3
+ target_pose_l.position.y = 0.2
+ target_pose_l.position.z = 0.0
+ botharms.set_pose_target(target_pose_r, 'RARM_JOINT5_Link')
+ botharms.set_pose_target(target_pose_l, 'LARM_JOINT5_Link')
+ botharms.go()
+```
+
+
+## その他の ROS_Client クラス利用法
+
+もう少し詳しく `ROS_Client` クラスについて見てみます.
+
+ここでは iPython コンソールを用います.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py (simulation)
+
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py -- --host %HOSTNAME% (for real robot)
+```
+
+クライアントクラスの `ros` がインスタンス化されていることを確認します.
+
+```python
+In [1]: ros
+Out[1]:
+```
+
+初期姿勢にします.
+
+```python
+In [2]: ros.go_init()
+[INFO] [WallTime: 1453005565.730952] [1923.265000] *** go_init begins ***
+[INFO] [WallTime: 1453005572.749935] [1930.345000] wait_for_result for the joint group rarm = True
+[INFO] [WallTime: 1453005572.750268] [1930.345000] [positions: [0.010471975511965976, 0.0, -1.7453292519943295, -0.26529004630313807, 0.16406094968746698, -0.05585053606381855]
+velocities: []
+accelerations: []
+effort: []
+time_from_start:
+ secs: 7
+ nsecs: 0]
+```
+
+
+### 関節角度指令コマンド
+
+ロボットの腕関節角度(ラジアン)の目標値指示による動作をさせるコマンドです.
+
+```python
+In [3]: ros.set_joint_angles_rad('larm', [0.010, 0.0, -2.094, -0.265, 0.164, 0.06], duration=2, wait=True)
+[INFO] [WallTime: 1453005602.774010] [1960.440000] wait_for_result for the joint group larm = True
+
+In [4]: ros.set_joint_angles_rad('larm', [0.010, 0.0, -1.745, -0.265, 0.164, 0.06], duration=2, wait=True)
+[INFO] [WallTime: 1453005606.789887] [1964.500000] wait_for_result for the joint group larm = True
+```
+
+- `set_joint_angles_deg` により "度/degree" 指示も可能です.
+- `set_joint_angles_*` メソッドは目標値の設定だけでなく,動作の実行も行います.
+
+
+### エンドエフェクタ姿勢指令コマンド
+
+ロボットのエンドエフェクタ(EEF)姿勢の目標値指示による動作をさせるコマンドです.
+
+```python
+IN [4]: ros.set_pose?
+Type: instancemethod
+Definition: ros.set_pose(self, joint_group, position, rpy=None, task_duration=7.0, do_wait=True, ref_frame_name=None)
+Docstring:
+@deprecated: Use set_pose_target (from MoveGroupCommander) directly.
+Accept pose defined by position and RPY in Cartesian format.
+
+@type joint_group: str
+@type position: [float]
+@param position: x, y, z.
+@type rpy: [float]
+@param rpy: If None, keep the current orientation by using
+ MoveGroupCommander.set_position_target. See:
+ 'http://moveit.ros.org/doxygen/' +
+ 'classmoveit__commander_1_1move__group_1_1' +
+ 'MoveGroupCommander.html#acfe2220fd85eeb0a971c51353e437753'
+@param ref_frame_name: reference frame for target pose, i.e. "LARM_JOINT5_Link".
+
+In [5]: ros.set_pose('larm', [0.3256221413929748, 0.18216922581330303, 0.16756590383473382], [-2.784279171494696, -1.5690964385875825, 2.899351051232168], task_duration=7, do_wait=True)
+[INFO] [WallTime: 1453007509.751512] [3869.365000] setpose jntgr=larm mvgr= pose=[0.3256221413929748, 0.18216922581330303, 0.16756590383473383, -2.784279171494696, -1.5690964385875825, 2.899351051232168] posi=[0.3256221413929748, 0.18216922581330303, 0.16756590383473383] rpy=[-2.784279171494696, -1.5690964385875825, 2.899351051232168]
+
+In [6]: ros.set_pose('larm', [0.3256221413929748, 0.18216922581330303, 0.06756590383473382], [-2.784279171494696, -1.5690964385875825, 2.899351051232168], task_duration=7, do_wait=True)
+[INFO] [WallTime: 1453007518.445929] [3878.220000] setpose jntgr=larm mvgr= pose=[0.3256221413929748, 0.18216922581330303, 0.06756590383473382, -2.784279171494696, -1.5690964385875825, 2.899351051232168] posi=[0.3256221413929748, 0.18216922581330303, 0.06756590383473382] rpy=[-2.784279171494696, -1.5690964385875825, 2.899351051232168]
+```
+
+### tf の利用
+
+エンドエフェクタ(EEF)の任意のフレームに対する相対姿勢を取得するために
+ROS の `tf` とそのリスナークライアントの `TransformListener` という強力なライブラリを使います.
+
+次のコードは左手のリンクフレーム `/LARM_JOINT_Link` の腰フレーム `/WAIST` に対する相対姿勢を取得する方法です.
+
+```python
+import tf
+
+import rospy
+
+listener = tf.TransformListener()
+try:
+ (trans, rot) = listener.lookupTransform('/WAIST', '/LARM_JOINT5_Link', rospy.Time(0))
+except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
+```
+
+取得された姿勢をロボットに送ります.
+
+```python
+In [7]: pos = list(trans)
+In [8]: rpy = list(tf.transformations.euler_from_quaternion(rot))
+In [9]: ros.set_pose('larm', pos, rpy, task_duration=7, do_wait=True)
+[INFO] [WallTime: 1453006377.256805] [2735.650000] setpose jntgr=larm mvgr= pose=[0.3255715961317417, 0.18217283734133255, 0.06760844121713444, 2.8644073530085747, -1.569564170540247, -2.7497620461224517] posi=[0.3255715961317417, 0.18217283734133255, 0.06760844121713444] rpy=[2.8644073530085747, -1.569564170540247, -2.7497620461224517]
+```
+
+- 注意
+ - `lookupTransform` 戻り値はタプル型なのに対して `set_pose` はリスト型を受け取る
+ - 姿勢を `set_pose` メソッドに送る前に "タプル→リスト変換" を忘れないようにする.
+
+`tf.transformation` にクォータニオンからオイラー角への変換を行うツールがあります.
+
+NumPy ライブラリを利用することで位置や姿勢のベクトルを変更することができます.
+
+- NumPy: https://docs.scipy.org/doc/numpy-dev/user/quickstart.html
+
+```python
+In [7]: ros.set_pose('larm', list(numpy.array(pos) + numpy.array([0,0,0.1])), rpy, task_duration=7, do_wait=True)
+[INFO] [WallTime: 1453006471.587639] [2830.075000] setpose jntgr=larm mvgr= pose=[0.32557159613174169, 0.18217283734133255, 0.16760844121713445, 2.8644073530085747, -1.569564170540247, -2.7497620461224517] posi=[0.32557159613174169, 0.18217283734133255, 0.16760844121713445] rpy=[2.8644073530085747, -1.569564170540247, -2.7497620461224517]
+```
+
+- メモ
+ - 認識プロセスによって検出されたオブジェクト姿勢からエンドエフェクタの目標姿勢を算出するために `lookupTransform` を利用することもできます.
+ - 例)ar_track_alvar などを用いて AR マーカオブジェクトのカメラからの相対位置を取得した場合
+ - ar_track_alvar: http://wiki.ros.org/ar_track_alvar
+ - 上記のコマンドでは HIRO / NEXTAGE OPEN のデフォルトのベースフレームである `/WAIST` フレームに対する相対姿勢を見ているので,必然的に Move Group の `get_current_pose` の結果と同じになります.
+ - 使用目的に応じて参照フレームを変更してください.
+
+
+
diff --git a/doc/manual_ja_tutorial_python-if.md b/doc/manual_ja_tutorial_python-if.md
new file mode 100644
index 00000000..1b0bed65
--- /dev/null
+++ b/doc/manual_ja_tutorial_python-if.md
@@ -0,0 +1,1157 @@
+
+# チュートリアル: Python インタフェース
+
+## RTM Python インタフェース
+
+### インタラクティブモードでの操作
+
+#### rtm_ros_bridge の起動
+
+rtm_ros_bridge を起動します.シミュレーションの場合は不要です.
+
+```
+$ roslaunch hironx_ros_bridge hironx_ros_bridge_real.launch nameserver:=%HOSTNAME% (HIRO)
+
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME% (NEXTAGE OPEN)
+```
+
+#### iPython インタフェースの起動
+
+HIRO での iPython インタフェースの起動
+ホスト名は各ロボットの設定に応じて変更してください.
+
+```
+ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py (Simulation)
+
+ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py -- --host hiro014 (Real robot example)
+```
+
+NEXTAGE OPEN での iPython インタフェースの起動
+
+```
+ipython -i `rospack find nextage_ros_bridge`/script/nextage.py (Simulation)
+
+ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --host nextage (Real Robot Example)
+```
+
+他のオプションも必要であれば指定することができます.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py -- --modelfile /opt/jsk/etc/HIRONX/model/main.wrl --host hiro014 --port 15005
+
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --modelfile /opt/jsk/etc/HIRONX/model/main.wrl --host nextage101 --port 15005
+```
+
+リモート接続する場合は `--robot` 引数を使用してロボットのインスタンス名を指定する必要があります.
+例えば次のように指定して実行します.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py -- --host nxo_simulation_host --robot "HiroNX(Robot)0"
+```
+iPython インタフェース初期化時に行っていることは次のようになっています.
+
+- RTCManager と RobotHardware の検出
+ - RTCManager: RT コンポーネントを起動する OpenRTM のクラス
+ - RobotHardware: ロボットハードウェアとのインタフェースである hrpsys に定義されているRTコンポーネント
+- hrpsys コントローラを動作させるのに必要な RT コンポーネントへの接続とアクティベーション
+- ロガーの開始
+- Joint Groups への割当て(HIRO/NEXTAGE OPEN 固有)
+
+#### よく使う RTM Python インタフェースコマンド
+
+ロボット実機操作において特有なコマンドを紹介します.
+
+- 注意-1: コマンドを実行するとロボットが動きます.
+- 注意-2: 緊急停止スイッチをいつでも押せる状態にしておいてください.
+
+ロボット実機のキャリブレーションを行うコマンドです.
+
+```
+ipython>>> robot.checkEncoders()
+```
+
+- ロボット実機のキャリブレーションがなされていない場合にのみ実行されます.
+ - ほとんどの場合においてロボット胸部の緑のロボットステートインジケータライトが点滅します.
+
+ロボットを初期姿勢するコマンドです.
+
+```
+ipython>>> robot.goInitial()
+```
+
+作業終了姿勢に移行するコマンドです.終了姿勢に移行した後にサーボが切れます.
+
+```
+ipython>>> robot.goOffPose()
+```
+
+- システムの�再起動・シャットダウン時の前にはこのコマンドを実行してください.
+
+サーボを入れるコマンドです.
+
+```
+ipython>>> robot.servoOn()
+```
+
+- 次の動作を行ってサーボが切れた状態のときには手動でサーボを入れる必要があります.
+ - `goOffPose` を実行したとき
+ - リレースイッチを押したとき(この場合はまず `servoOff` を行う必要があります)
+ - ロボットに異常動作を与えて緊急停止したとき
+- 現状の物理的関節角度にて角度指示値を設定します.
+ - `goActual()` を内部的に呼び出しています.
+
+サーボを切るコマンドです.
+
+```
+ipython>>> robot.servoOff()
+```
+
+- 明示的にサーボを切るのではなくリレースイッチを押した場合にはこのコマンドを実行してください.
+
+#### RTM Python インタフェースの利用
+
+iPython �の初期化時にロボットのクライアントインタフェースクラスである HIRONX/NextageClient が iPython ターミナル上で `robot` ととしてインスタンス化されます.
+
+`robot` において何ができるのかを見てみます.
+
+```
+In : robot.
+```
+
+上記のように iPython ターミナル上で入力したのに tab キーを押すと選択可能なものが表示されます.
+
+```
+robot.Groups robot.getCurrentRPY robot.rh_svc
+robot.HandClose robot.getCurrentRotation robot.saveLog
+robot.HandGroups robot.getJointAngles robot.sc
+robot.HandOpen robot.getRTCInstanceList robot.sc_svc
+robot.InitialPose robot.getRTCList robot.sensors
+robot.OffPose robot.getReferencePose robot.seq
+robot.RtcList robot.getReferencePosition robot.seq_svc
+robot.abc robot.getReferenceRPY robot.servoOff
+robot.activateComps robot.getReferenceRotation robot.servoOn
+robot.afs robot.getSensors robot.setHandEffort
+robot.checkEncoders robot.goActual robot.setHandJointAngles
+robot.clearLog robot.goInitial robot.setHandWidth
+robot.co robot.goOffPose robot.setJointAngle
+robot.co_svc robot.hand_width2angles robot.setJointAngles
+robot.configurator_name robot.hgc robot.setJointAnglesOfGroup
+robot.connectComps robot.ic robot.setSelfGroups
+robot.connectLoggerPort robot.init robot.setTargetPose
+robot.createComp robot.isCalibDone robot.setupLogger
+robot.createComps robot.isServoOn robot.sh
+robot.el robot.kf robot.sh_svc
+robot.el_svc robot.lengthDigitalInput robot.simulation_mode
+robot.ep_svc robot.lengthDigitalOutput robot.st
+robot.findModelLoader robot.liftRobotUp robot.stOff
+robot.fk robot.loadPattern robot.tf
+robot.fk_svc robot.log robot.vs
+robot.flat2Groups robot.log_svc robot.waitForModelLoader
+robot.getActualState robot.moveHand robot.waitForRTCManagerAndRoboHardware
+robot.getBodyInfo robot.ms robot.waitInterpolation
+robot.getCurrentPose robot.readDigitalInput robot.waitInterpolationOfGroup
+robot.getCurrentPosition robot.rh robot.writeDigitalOutput
+```
+
+`Groups` のリストとそのメンバを見てみます.
+
+```
+In : robot.Groups
+Out:
+[['torso', ['CHEST_JOINT0']],
+ ['head', ['HEAD_JOINT0', 'HEAD_JOINT1']],
+ ['rarm',
+ ['RARM_JOINT0',
+ 'RARM_JOINT1',
+ 'RARM_JOINT2',
+ 'RARM_JOINT3',
+ 'RARM_JOINT4',
+ 'RARM_JOINT5']],
+ ['larm',
+ ['LARM_JOINT0',
+ 'LARM_JOINT1',
+ 'LARM_JOINT2',
+ 'LARM_JOINT3',
+ 'LARM_JOINT4',
+ 'LARM_JOINT5']]]
+```
+
+スクリプトインタラプタとしての iPython の利点はそこから API の情報を得られることにあります.
+
+例えば,ロボットの現在の姿勢を知りたいがそのコマンドを知らないような場合でも,
+まず少し推測してからタブ補完を利用することで次のように情報を得ることができます.
+
+```
+In : robot.getCurrent
+robot.getCurrentPose robot.getCurrentPosition robot.getCurrentRPY robot.getCurrentRotation
+```
+
+`getCurren` に対して4つの選択肢があり,
+この内 `getCurrentPose` が意図するもののコマンドらしいことが分ります.
+さらにそのメソッドの引数を知る必要がある場合にはコマンドの最後に `?` を入力します.
+
+```
+In : robot.getCurrentPose?
+Type: instancemethod
+Base Class:
+String Form:>
+Namespace: Interactive
+File: /opt/ros/hydro/lib/python2.7/dist-packages/hrpsys_config.py
+Definition: robot.getCurrentPose(self, lname)
+Docstring:
+```
+
+ここで `getCurrentPose` は `lname`(link name の略)を受け取ることが分ります.
+よって次のように実行します.
+
+```
+In: robot.getCurrentPose('RARM_JOINT0')
+Out:
+[0.912826202314136,
+ -0.4083482880688395,
+ 0.0,
+ 0.0,
+ 0.39443415756662026,
+ 0.8817224037285941,
+ -0.25881904510252074,
+ -0.145,
+ 0.1056883139872261,
+ 0.2362568060275051,
+ 0.9659258262890683,
+ 0.370296,
+ 0.0,
+ 0.0,
+ 0.0,
+ 1.0]
+```
+
+この `getCurrentPose` は指示したリンクの回転行列と位置の値を1次元のリストとして戻します.
+
+位置だけを知りたい場合には他の次の方法で取得することもできます.
+
+```
+In: robot.getCurrent
+robot.getCurrentPose robot.getCurrentPosition robot.getCurrentRPY robot.getCurrentRotation
+
+In : robot.getCurrentPosition('RARM_JOINT0')
+Out: [0.0, -0.145, 0.370296]
+```
+
+hrpsys においては位置ベクトルは次のように対応した3つの要素 [x, y, z] で表されます.
+
+- x: 前
+- y: 左
+- z: 上
+
+---
+
+次に腕を動かしてみます.
+まず初期姿勢まで動かします.
+
+```
+In : robot.goInitial()
+```
+
+目標姿勢を設定するにはどうすれば良いかを調べます.
+
+```
+In : robot.setTargetPose?
+Type: instancemethod
+Base Class:
+String Form:>
+Namespace: Interactive
+File: /opt/ros/hydro/lib/python2.7/dist-packages/hrpsys/hrpsys_config.py
+Definition: robot.setTargetPose(self, gname, pos, rpy, tm)
+Docstring:
+```
+
+`gname` は `joint group` の名前です.
+`pos` と `rpy` はリスト形式です.
+
+目標姿勢を指定する前に現在のロボットの姿勢を変数に格納します.
+
+```
+In : pos = robot.getCurrentPosition('RARM_JOINT5')
+In : rpy = robot.getReferenceRPY('RARM_JOINT5')
+In : tm = 3
+```
+
+ロボットの姿勢はおそらく下図のようになっていることと思います.
+
+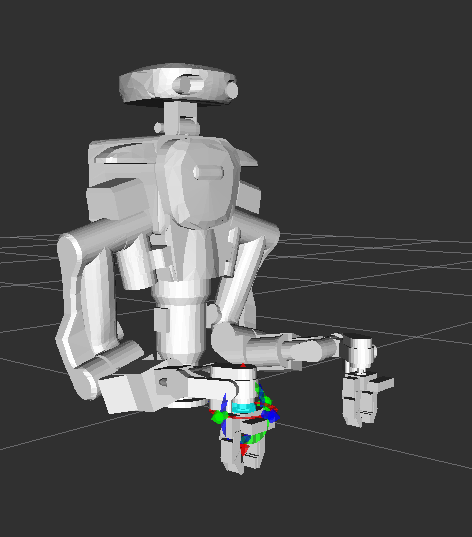
+
+それでは目標位置を現在の姿勢から少し変えて指示して,そこへの動作を実行させてみましょう.
+
+```
+In : pos[2] = 0.1
+
+In : robot.setTargetPose('rarm', pos, rpy, tm)
+Out: True
+```
+
+次の図のように右腕の手先が指定した位置へと移動したことと思います.
+
+- 注意: 下図は MoveIt! が実行されているときにキャプチャしたもので,MoveIt! 由来の黄緑色で表示されている開始姿勢の腕はここのチュートリアルでは関係しませんので無視してください.
+
+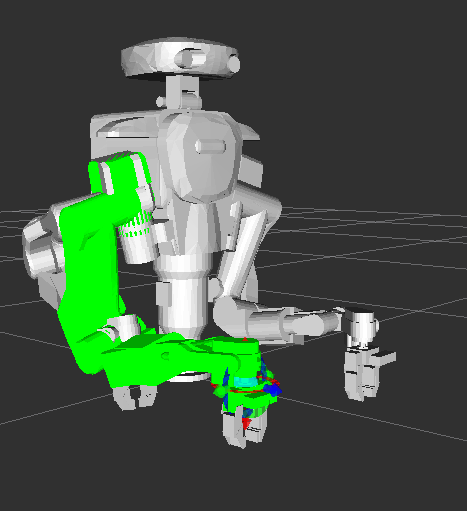
+
+ロボットでの作業が終了したら終了姿勢にしてください.
+
+```
+In : robot.goOffPose()
+```
+
+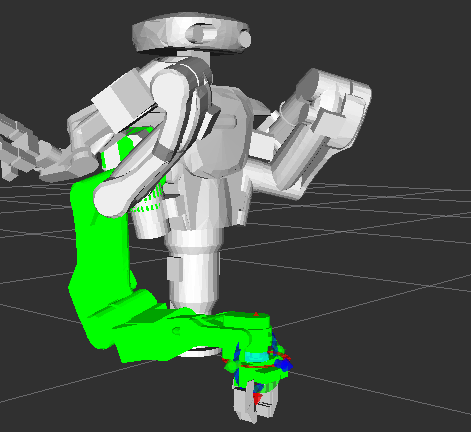
+
+#### hrpsys-based API のソースとドキュメント
+
+hrpsys-based API は次のリンク先にソースとドキュメントがあります.
+
+- 多くのコマンドは hrpsys_config.HrpsysConfigurator のペアレントクラスに定義されています.
+ - http://fkanehiro.github.io/hrpsys-base/df/d98/classpython_1_1hrpsys__config_1_1HrpsysConfigurator.html
+- HIRO: hironx_ros_bridge/scripts/
+ - https://github.com/start-jsk/rtmros_hironx/blob/hydro-devel/hironx_ros_bridge/scripts/hironx.py
+- NEXTAGE OPEN: nextage_ros_bridge/scripts/
+ - https://github.com/tork-a/rtmros_nextage/blob/hydro-devel/nextage_ros_bridge/src/nextage_ros_bridge/nextage_client.py
+
+
+### RTM Python インタフェースプログラミング
+
+Python を用いた HIRO / NEXTAGE OPEN のプログラミングは1つの統合されたインタフェースによって行うことができます.
+インタフェースの名称はロボットによりそれぞれ異なります.
+
+- HIRONX : HIRO / HIRONX ユーザ
+- NextageClient : NEXTAGE OPEN ユーザ
+
+本項では "HIRONX" を使用しますが NEXTAGE OPEN ユーザは NextageClient インタフェースを用いて同様のことを行うことができます.
+
+#### サンプルコード - Acceptance Test (RTM)
+
+Acceptance Test (RTM) のコードを参考に RTM Python インタフェースプログタミング
+の方法を見たあとにコードを実行します.
+
+##### acceptancetest_rtm.py
+
+まずこのサンプルは下図のような2段階の依存関係を持っています.
+
+
+
+このサンプルコードの動作は `AcceptanceTest_Hiro` クラスに記述されていて
+`HIRONX` クラスに接続する `AcceptancetestRTM` クラスを利用しています.
+
+`AcceptancetestRTM` について見てみます.コードの全体は次のようになっています.
+
+- https://raw.githubusercontent.com/start-jsk/rtmros_hironx/a7a43e5baf4dcd48e34b94f9781defadfbca03d0/hironx_ros_bridge/src/hironx_ros_bridge/testutil/acceptancetest_rtm.py
+
+```python
+1 # -*- coding: utf-8 -*-
+2
+3 # Software License Agreement (BSD License)
+4 #
+5 # Copyright (c) 2014, TORK (Tokyo Opensource Robotics Kyokai Association)
+6 # All rights reserved.
+7 #
+8 # Redistribution and use in source and binary forms, with or without
+9 # modification, are permitted provided that the following conditions
+10 # are met:
+11 #
+12 # * Redistributions of source code must retain the above copyright
+13 # notice, this list of conditions and the following disclaimer.
+14 # * Redistributions in binary form must reproduce the above
+15 # copyright notice, this list of conditions and the following
+16 # disclaimer in the documentation and/or other materials provided
+17 # with the distribution.
+18 # * Neither the name of TORK. nor the
+19 # names of its contributors may be used to endorse or promote products
+20 # derived from this software without specific prior written permission.
+21 #
+22 # THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
+23 # "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
+24 # LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
+25 # FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
+26 # COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
+27 # INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
+28 # BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
+29 # LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
+30 # CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
+31 # LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
+32 # ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
+33 # POSSIBILITY OF SUCH DAMAGE.
+34
+35 import time
+36
+37 from hironx_ros_bridge.constant import Constant
+38 from hironx_ros_bridge.testutil.abst_acceptancetest import AbstAcceptanceTest
+39
+40
+41 class AcceptanceTestRTM(AbstAcceptanceTest):
+42
+43 def __init__(self, robot_client):
+44 '''
+45 @type robot_client: hironx_ros_bridge.hironx_client.HIRONX
+46 '''
+47 self._robotclient = robot_client
+48
+49 def go_initpos(self):
+50 self._robotclient.goInitial()
+51
+52 def set_joint_angles(self, joint_group, joint_angles, msg_tasktitle=None,
+53 task_duration=7.0, do_wait=True):
+54 '''
+55 @see: AbstAcceptanceTest.set_joint_angles
+56 '''
+57 print("== RTM; {} ==".format(msg_tasktitle))
+58 self._robotclient.setJointAnglesOfGroup(
+59 joint_group, joint_angles, task_duration, do_wait)
+60
+61 def set_pose(self, joint_group, pose, rpy, msg_tasktitle,
+62 task_duration=7.0, do_wait=True, ref_frame_name=None):
+63
+64 print("== RTM; {} ==".format(msg_tasktitle))
+65 self._robotclient.setTargetPose(joint_group, pose, rpy, task_duration,
+66 ref_frame_name)
+67 if do_wait:
+68 self._robotclient.waitInterpolationOfGroup(joint_group)
+69
+70 def set_pose_relative(
+71 self, joint_group, dx=0, dy=0, dz=0, dr=0, dp=0, dw=0,
+72 msg_tasktitle=None, task_duration=7.0, do_wait=True):
+73 if joint_group == Constant.GRNAME_LEFT_ARM:
+74 eef = 'LARM_JOINT5'
+75 elif joint_group == Constant.GRNAME_RIGHT_ARM:
+76 eef = 'RARM_JOINT5'
+77
+78 print("== RTM; {} ==".format(msg_tasktitle))
+79 self._robotclient.setTargetPoseRelative(
+80 joint_group, eef, dx, dy, dz, dr, dp, dw,
+81 task_duration, do_wait)
+82
+83 def _run_tests_hrpsys(self):
+84 '''
+85 @deprecated: This method remains as a reference. This used to function
+86 when being called directly from ipython commandline and
+87 now replaced by optimized codes.
+88 '''
+89 _TIME_SETTARGETP_L = 3
+90 _TIME_SETTARGETP_R = 2
+91 _TIME_BW_TESTS = 5
+92
+93 self.robot.goInitial()
+94
+95 # === TASK-1 ===
+96 # L arm setTargetPose
+97 _POS_L_INIT = self.robot.getCurrentPosition('LARM_JOINT5')
+98 _POS_L_INIT[2] += 0.8
+99 _RPY_L_INIT = self.robot.getCurrentRPY('LARM_JOINT5')
+100 self.robot.setTargetPose('larm', _POS_L_INIT, _RPY_L_INIT, _TIME_SETTARGETP_L)
+101 self.robot.waitInterpolationOfGroup('larm')
+102
+103 # R arm setTargetPose
+104 _POS_R_INIT = self.robot.getCurrentPosition('RARM_JOINT5')
+105 _POS_R_INIT[2] -= 0.07
+106 _RPY_R_INIT = self.robot.getCurrentRPY('RARM_JOINT5')
+107 self.robot.setTargetPose('rarm', _POS_R_INIT, _RPY_R_INIT, _TIME_SETTARGETP_R)
+108 self.robot.waitInterpolationOfGroup('rarm')
+109 time.sleep(_TIME_BW_TESTS)
+110
+111 # === TASK-2 ===
+112 self.robot.goInitial()
+113 # Both arm setTargetPose
+114 _Z_SETTARGETP_L = 0.08
+115 _Z_SETTARGETP_R = 0.08
+116 self.robot.setTargetPoseRelative('larm', 'LARM_JOINT5',
+117 dz=_Z_SETTARGETP_L,
+118 tm=_TIME_SETTARGETP_L, wait=False)
+119 self.robot.setTargetPoseRelative('rarm', 'RARM_JOINT5',
+120 dz=_Z_SETTARGETP_R,
+121 tm=_TIME_SETTARGETP_R, wait=False)
+122
+123 # === TASK-3 ===
+124 # Head toward down
+125 _TIME_HEAD = 5
+126 self.robot.setTargetPoseRelative('head', 'HEAD_JOINT0', dp=0.1, tm=_TIME_HEAD)
+127 self.robot.waitInterpolationOfGroup('head')
+128 # Head toward up
+129 self.robot.setTargetPoseRelative('head', 'HEAD_JOINT0', dp=-0.2, tm=_TIME_HEAD)
+130 self.robot.waitInterpolationOfGroup('head')
+131 # See left by position
+132 self.robot.setJointAnglesOfGroup('head', [50, 10], 2, wait=True)
+133 # See right by position
+134 self.robot.setJointAnglesOfGroup('head', [-50, -10], 2, wait=True)
+135 # Set back face to the starting pose w/o wait.
+136 self.robot.setJointAnglesOfGroup( 'head', [0, 0], 2, wait=False)
+137
+138 # === TASK-4 ===
+139 # 0.1mm increment is not working for some reason.
+140 self.robot.goInitial()
+141 # Move by iterating 0.1mm at cartesian space
+142 _TIME_CARTESIAN = 0.1
+143 _INCREMENT_MIN = 0.0001
+144 for i in range(300):
+145 self.robot.setTargetPoseRelative('larm', 'LARM_JOINT5',
+146 dy=_INCREMENT_MIN,
+147 tm=_TIME_CARTESIAN)
+148 self.robot.setTargetPoseRelative('rarm', 'RARM_JOINT5',
+149 dy=_INCREMENT_MIN,
+150 tm=_TIME_CARTESIAN)
+151 print('{}th move'.format(i))
+152
+153 self.robot.goInitial()
+154 # === TASK-5 ===
+155 # Turn torso
+156 _TORSO_ANGLE = 120
+157 _TIME_TORSO_R = 7
+158 self.robot.setJointAnglesOfGroup('torso', [_TORSO_ANGLE], _TIME_TORSO_R, wait=True)
+159 self.robot.waitInterpolationOfGroup('torso')
+160 self.robot.setJointAnglesOfGroup('torso', [-_TORSO_ANGLE], 10, wait=True)
+161
+162 self.robot.goInitial()
+163
+164 # === TASK-6.1 ===
+165 # Overwrite previous command, for torso using setJointAnglesOfGroup
+166 self.robot.setJointAnglesOfGroup('torso', [_TORSO_ANGLE], _TIME_TORSO_R,
+167 wait=False)
+168 time.sleep(1)
+169 self.robot.setJointAnglesOfGroup('torso', [-_TORSO_ANGLE], 10, wait=True)
+170
+171 self.robot.goInitial(5)
+172
+173 # === TASK-6.2 ===
+174 # Overwrite previous command, for arms using setTargetPose
+175 _X_EEF_OVERWRITE = 0.05
+176 _Z_EEF_OVERWRITE = 0.1
+177 _TIME_EEF_OVERWRITE = 7
+178 _POS_L_INIT[0] += _X_EEF_OVERWRITE
+179 _POS_L_INIT[2] += _Z_EEF_OVERWRITE
+180 self.robot.setTargetPose('larm', _POS_L_INIT, _RPY_L_INIT, _TIME_EEF_OVERWRITE)
+181 self.robot.waitInterpolationOfGroup('larm')
+182 # Trying to raise rarm to the same level of larm.
+183 _POS_R_INIT[0] += _X_EEF_OVERWRITE
+184 _POS_R_INIT[2] += _Z_EEF_OVERWRITE
+185 self.robot.setTargetPose('rarm', _POS_R_INIT, _RPY_R_INIT, _TIME_EEF_OVERWRITE)
+186 self.robot.waitInterpolationOfGroup('rarm')
+187 time.sleep(3)
+188 # Stop rarm
+189 self.robot.clearOfGroup('rarm') # Movement should stop here.
+190
+191 # === TASK-7.1 ===
+192 # Cover wide workspace.
+193 _TIME_COVER_WORKSPACE = 3
+194 # Close to the max width the robot can spread arms with the hand kept
+195 # at table level.
+196 _POS_L_X_NEAR_Y_FAR = [0.32552812002303166, 0.47428609880442024, 1.0376656470275407]
+197 _RPY_L_X_NEAR_Y_FAR = (-3.07491977663752, -1.5690249316560323, 3.074732073335767)
+198 _POS_R_X_NEAR_Y_FAR = [0.32556456455769633, -0.47239119592815987, 1.0476131608682244]
+199 _RPY_R_X_NEAR_Y_FAR = (3.072515432213872, -1.5690200270375372, -3.072326882451363)
+200
+201 # Close to the farthest distance the robot can reach, with the hand kept
+202 # at table level.
+203 _POS_L_X_FAR_Y_FAR = [0.47548142379781055, 0.17430276793604782, 1.0376878025614884]
+204 _RPY_L_X_FAR_Y_FAR = (-3.075954857224205, -1.5690261926181046, 3.0757659493049574)
+205 _POS_R_X_FAR_Y_FAR = [0.4755337947019357, -0.17242322190721648, 1.0476395479774052]
+206 _RPY_R_X_FAR_Y_FAR = (3.0715850722714944, -1.5690204449882248, -3.071395243174742)
+207 self.robot.setTargetPose('larm', _POS_L_X_NEAR_Y_FAR, _RPY_L_X_NEAR_Y_FAR, _TIME_COVER_WORKSPACE)
+208 self.robot.setTargetPose('rarm', _POS_R_X_NEAR_Y_FAR, _RPY_R_X_NEAR_Y_FAR, _TIME_COVER_WORKSPACE)
+209 self.robot.waitInterpolationOfGroup('larm')
+210 self.robot.waitInterpolationOfGroup('rarm')
+211 time.sleep(3)
+212 self.robot.setTargetPose('larm', _POS_L_X_FAR_Y_FAR, _RPY_L_X_FAR_Y_FAR, _TIME_COVER_WORKSPACE)
+213 self.robot.setTargetPose('rarm', _POS_R_X_FAR_Y_FAR, _RPY_R_X_FAR_Y_FAR, _TIME_COVER_WORKSPACE)
+214 self.robot.waitInterpolationOfGroup('larm')
+215 self.robot.waitInterpolationOfGroup('rarm')
+216
+217 self.robot.goInitial()
+```
+
+タスクの内容を少し見てみます.
+
+```python
+37 from hironx_ros_bridge.constant import Constant
+38 from hironx_ros_bridge.testutil.abst_acceptancetest import AbstAcceptanceTest
+```
+
+RTM API の HIRONX もしくは NextageClient クラスがインポートされていません.しかし,次の部分を見ると...
+
+```python
+43 def __init__(self, robot_client):
+44 '''
+45 @type robot_client: hironx_ros_bridge.hironx_client.HIRONX
+46 '''
+47 self._robotclient = robot_client
+```
+
+コンストラクタが HIRONX を受け取り,メンバー `self._robotclient` に格納していることが分ります.
+以後は `self._robotclient` が HIRONX クラスインスタンスを参照することとなります.
+
+コードの残りの部分は基本的な操作を行っているだけです.
+
+例えば次のような部分です.
+簡潔に全ての関節が初期姿勢になるように記述されています.
+
+```python
+49 def go_initpos(self):
+50 self._robotclient.goInitial()
+```
+
+> 後々,自分のコードを開発してゆくうちに,
+各クラスとメソッドの API ドキュメントを見てオプションを知りたくなるかもしれません.
+このチュートリアルでは詳しく説明しませんので,ぜひご自身で探索してみてください.
+例えば `goInitial` メソッドには次のオプションがあります.
+```python
+def hironx_ros_bridge.hironx_client.HIRONX.goInitial(self, tm = 7, wait = True, init_pose_type = 0)
+```
+- http://docs.ros.org/hydro/api/hironx_ros_bridge/html/classhironx__ros__bridge_1_1hironx__client_1_1HIRONX.html#a295b0b4950cb580273b224dc659c8a23
+
+更に例を挙げると次の部分です.
+
+```python
+52 def set_joint_angles(self, joint_group, joint_angles, msg_tasktitle=None,
+53 task_duration=7.0, do_wait=True):
+54 '''
+55 @see: AbstAcceptanceTest.set_joint_angles
+56 '''
+57 print("== RTM; {} ==".format(msg_tasktitle))
+58 self._robotclient.setJointAnglesOfGroup(
+59 joint_group, joint_angles, task_duration, do_wait)
+```
+
+こちらも簡潔に HIRONX のメソッドを呼び出すだけで,
+多くのことがすでに HIRONX 内で処理されているので,
+このような簡単な方法でコードを書くことができます.
+
+##### サンプルコードの実行
+
+新しい iPython ターミナルを開きます.
+少なくとも3つのターミナルが開いた状態になっています.
+次のように iPython ターミナルを起動します.
+シミュレーション環境の場合はそれに合わせて起動してください.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/acceptancetest_hironx.py -- --host %HOSTNAME%
+```
+
+次のコマンドで RTM インタフェースを通じてタスクが実行されます.
+
+- 注意: ロボットが動きます.
+
+```
+IN [1]: acceptance.run_tests_rtm()
+```
+
+次のように記述することでタスクの逐次実行もできます.
+
+```
+IN [1]: acceptance.run_tests_rtm(do_wait_input=True)
+```
+
+iPython インタフェースを終了するときは `Ctrl-d` にてエスケーブします.
+
+
+#### サンプルコード - 円を描く
+
+ロボットのエンドエフェクタで円を描くサンプルコードを下記に示します.
+
+- 注意: 本コードを改変する場合はまずシミュレーションでその動作を確認してから実機で動作させてください.
+
+[NEXTAGE OPEN] Robots hands drawing circles: https://www.youtube.com/watch?v=OVae1xa5Rak
+
+変数 `robot` は何らかの方法でユーザの HIRONX/NextageClient クラスのインスタンスに置き換える必要があります.
+
+```python
+def circle_eef(radius=0.01, eef='larm', step_degree=5, ccw=True, duration=0.1):
+ '''
+ Moves the designated eef point-by-point so that the trajectory as a whole draws a circle.
+
+ Currently this only works on the Y-Z plane of *ARM_JOINT5 joint.
+ And it's the most intuitive when eef maintains a "goInitial" pose where circle gets drawn on robot's X-Y plane
+ (see the wiki for the robot's coordinate if you're confused http://wiki.ros.org/rtmros_nextage/Tutorials/Programming#HiroNXO_3D_model_coordination).
+
+ Points on the circular trajectory is based on a standard equation https://en.wikipedia.org/wiki/Circle#Equations
+
+ @param radius: (Unit: meter) Radius of the circle to be drawn.
+ @param step_degree: Angle in degree each iteration increments.
+ @param ccw: counter clock-wise.
+ @param duration: Time for each iteration to be completed.
+ '''
+ goal_deg = GOAL_DEGREE = 360
+ start_deg = 0
+ if eef == 'larm':
+ joint_eef = 'LARM_JOINT5'
+ elif eef == 'rarm':
+ joint_eef = 'RARM_JOINT5'
+ eef_pos = robot.getCurrentPosition(joint_eef)
+ eef_rpy = robot.getCurrentRPY(joint_eef)
+ print('eef_pos={}'.format(eef_pos))
+ X0 = eef_pos[0]
+ Y0 = eef_pos[1]
+ ORIGIN_x = X0
+ ORIGIN_y = Y0 - radius
+ print('ORIGIN_x={} ORIGIN_y={}'.format(ORIGIN_x, ORIGIN_y))
+ i = 0
+ for theta in range(start_deg, goal_deg, step_degree):
+ if not ccw:
+ theta = -theta
+ x = ORIGIN_x + radius*math.sin(math.radians(theta)) # x-axis in robot's eef space is y in x-y graph
+ y = ORIGIN_y + radius*math.cos(math.radians(theta))
+ eef_pos[0] = x
+ eef_pos[1] = y
+ print('#{}th theta={} x={} y={} X0={} Y0={}'.format(i, theta, x, y, X0, Y0))
+ robot.setTargetPose(eef, eef_pos, eef_rpy, duration)
+ robot.waitInterpolation()
+ i += 1
+```
+
+#### 使用場面に応じたプログラミング
+
+デフォルトではいくつかの HIRONX / NextageClient クラスのコマンドは
+動作終了を待ってから次の動作を開始します.
+またいくつかのコマンドはそのように待たないものもあります.
+それは各メソッドが受け取る引数から明確になる実装に依存します.
+`wait` 引数を持つメソッドは待機するかどうかを指定できます.
+それ以外のものは特に API ドキュメントに記述の無いかぎり待機の可否を指定できません.
+
+次は "待機" の特性を持つメソッドの例です.
+
+```python
+70 def set_pose_relative(
+71 self, joint_group, dx=0, dy=0, dz=0, dr=0, dp=0, dw=0,
+72 msg_tasktitle=None, task_duration=7.0, do_wait=True):
+73 if joint_group == Constant.GRNAME_LEFT_ARM:
+74 eef = 'LARM_JOINT5'
+75 elif joint_group == Constant.GRNAME_RIGHT_ARM:
+76 eef = 'RARM_JOINT5'
+77
+78 print("== RTM; {} ==".format(msg_tasktitle))
+79 self._robotclient.setTargetPoseRelative(
+80 joint_group, eef, dx, dy, dz, dr, dp, dw,
+81 task_duration, do_wait)
+```
+
+一般にはデフォルトでは `wait=True` とした方が安全となるでしょう.
+
+次の `setTargetPose` は待機・中断の信号は受け取りません.
+この場合においては `HrpsysConfigurator` の `waitInterpolationOfGroup()` を呼び出して対処することができます.
+`HrpSysConfigurator` は `HIRONX` の親クラスです.
+
+```python
+61 def set_pose(self, joint_group, pose, rpy, msg_tasktitle,
+62 task_duration=7.0, do_wait=True, ref_frame_name=None):
+63
+64 print("== RTM; {} ==".format(msg_tasktitle))
+65 self._robotclient.setTargetPose(joint_group, pose, rpy, task_duration,
+66 ref_frame_name)
+67 if do_wait:
+68 self._robotclient.waitInterpolationOfGroup(joint_group)
+```
+
+
+#### 連続した軌道座標指示による動作
+
+次のようにすることで連続した軌道座標指示による動作を行うことができます.
+
+```python
+hcf.playPatternOfGroup('LARM',
+ [[0.010,0.0,-1.745,-0.265,0.164,0.06],
+ [0.010,-0.2,-2.045,-0.265,0.164,0.06],
+ [0.010,-0.4,-2.245,-0.265,0.164,0.06],
+ [0.010,-0.6,-2.445,-0.265,0.164,0.06],
+ [0.010,-0.8,-2.645,-0.265,0.164,0.06]],
+ [1,1,1,1,1])
+```
+
+`hcf` は `robot` など Python インタフェースを起動した状況に応じて変更してください.
+
+hrpsys 315.6.0 以降では `setJointAnglesSequenceOfGroup` も利用することができます.
+
+- https://github.com/fkanehiro/hrpsys-base/blob/3eab14b836dea11386dbdb7d0ab90a0ed9521237/python/hrpsys_config.py#L1018
+
+#### 相対姿勢指示による動作
+
+エンドエフェクタのフレームや関節を現在の姿勢からの相対姿勢を指示して動作させるのも
+HIRONX インタフェースの `setTargetPoseRelative` を用いることで簡単に行うことができます.
+
+下記の `[1]` では `torso` を 3[s] かけて 0.1[rad] 回転させます.
+`[2]` では右腕のエンドエフェクタフレームを 3[s] かけて前方に 0.1[m] 移動させます.
+
+```python
+In [1]: robot.setTargetPoseRelative('torso', 'CHEST_JOINT0', dw=0.1, tm=3)
+
+In [2]: robot.setTargetPoseRelative('rarm', 'RARM_JOINT5', dx=0.1, tm=3)
+```
+
+#### ユーザ Python コードの作成
+
+ここまでの RTM Python インタフェースのチュートリアルでは `hironx.py` や `nextage.py` といったスクリプトを実行していました.
+
+クライアントインタフェースクラスのメソッドを利用して
+アプリケーションモジュールを作成する方法を考えてみます.
+そのモジュールを `your_nxo_sample.py` と名付け,
+それをシミュレーションなり実機なりで動作させるものとします.
+
+1. まず1つの方法として `nextage.py` を複製して `NextageClient` クラスがインスタンス化される行を書き換えます.
+他の `NextageClient` クラスがアクセスする部分も消したり書き換えたりします.
+2. 上記の方法はあまりスマートで簡潔ではありません.
+それは大部分のコードを複製するというのはソフトウェア開発においては悪い実践法であるからです.
+例えば [hrpsys_tools/hrpsys_tools_config.py](https://github.com/start-jsk/rtmros_common/blob/master/hrpsys_tools/scripts/hrpsys_tools_config.py) は
+この目的に役立つことを意図して作られています.
+ - 参考: 作成時のディスカッション - https://github.com/start-jsk/rtmros_common/issues/340
+
+
+### デジタルI/O の利用(NEXTAGE OPEN)
+
+本項はデジタルI/O(DIO)が備わっている NEXTAGE OPEN でのみ有効です.
+
+DIO 操作で利用できるメソッドの全体については利用可能なメソッドが集約されている API ドキュメント,
+特にデフォルトで利用可能なメソッドが集められている `NextageClient` クラスを参照してください。
+
+- APIドキュメント: http://docs.ros.org/hydro/api/nextage_ros_bridge/html/annotated.html
+- NextageClient: http://docs.ros.org/hydro/api/nextage_ros_bridge/html/classnextage__ros__bridge_1_1nextage__client_1_1NextageClient.html
+
+#### RTM クライアントからのインタラクティブな操作
+
+まず RTM クライアントを実行し,ネームサーバー内部(つまり QNX コントローラボックス上)のロボットに接続する必要があります.
+
+```
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --host %HOST%
+```
+
+そうすると `_hands` オブジェクトから全ての DIO メソッドにアクセスすることができます.
+iPython ターミナルで表示させると次のようになります.
+
+```python
+In [6]: robot._hands.h
+robot._hands.handlight_both robot._hands.handtool_l_attach robot._hands.handtool_r_eject
+robot._hands.handlight_l robot._hands.handtool_l_eject
+robot._hands.handlight_r robot._hands.handtool_r_attach
+
+In [6]: robot._hands.g
+robot._hands.gripper_l_close robot._hands.gripper_r_close
+robot._hands.gripper_l_open robot._hands.gripper_r_open
+
+In [6]: robot._hands.a
+robot._hands.airhand_l_drawin robot._hands.airhand_l_release robot._hands.airhand_r_keep
+robot._hands.airhand_l_keep robot._hands.airhand_r_drawin robot._hands.airhand_r_release
+```
+
+ハンドツールを接続・取り外しする場合は次のように行います.
+
+- ハンドへのツールの接続
+ - ツールチェンジャの先端にあるソレノイドバルブが閉じている必要があります.
+ - イジェクトツールコマンドでバルブを閉じることができます.
+ - http://docs.ros.org/hydro/api/nextage_ros_bridge/html/classnextage__ros__bridge_1_1nextage__client_1_1NextageClient.html#a1702a5edb90cf8d6e67164760e2d6e91
+- ハンドからツールの取り外し
+ - ツールが落ちてきますので気をつけてください.
+ - http://docs.ros.org/hydro/api/nextage_ros_bridge/html/classnextage__ros__bridge_1_1nextage__client_1_1NextageClient.html#ac562d5f65e6e994692e17c499d0ff745
+
+他のよく使われるメソッドについてはその名前自体から大体の機能は類推できるかと思います.
+
+- グリッパの開閉: `gripper_l_open`, `gripper_r_open`, `gripper_l_close`, `gripper_r_close`
+- ライトの点灯等: `handlight_both`, `handlight_l`, `handlight_r`
+
+サンプルとしてハンドDIOのシステムテストツールも参考にしてください.
+
+- https://github.com/tork-a/rtmros_nextage/blob/7cf7d3ef1c1d24cd496dfc646c70e83565e8e854/nextage_ros_bridge/test/test_gripper.py
+
+#### 2014年8月よりも前に出荷された NEXTAGE OPEN での DIO の利用
+
+2014年8月よりも前に出荷された NEXTAGE OPEN で DIO を利用する場合は
+DIO のバージョンを指定する必要があります.
+
+```
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --host %HOST% --dio_ver 0.4.2
+```
+
+`NextageClient` インスタンスに DIO を指定する場合には
+`set_hand_version` メソッドにて引数 `0.4.2` を与えて指定してください.
+このバージョン番号は固定で,変更する必要はありません.
+
+- set_hand_version: http://docs.ros.org/indigo/api/nextage_ros_bridge/html/classnextage__ros__bridge_1_1nextage__client_1_1NextageClient.html#a670568692e46cfc3f10633ad962b8616
+
+
+## ROS Python インタフェース
+
+### インタラクティブモードでの操作
+
+#### rtm_ros_bridge の起動
+
+rtm_ros_bridge を起動します.シミュレーションンの場合は不要です.
+
+```
+$ roslaunch hironx_ros_bridge hironx_ros_bridge_real.launch nameserver:=%HOSTNAME% (HIRO)
+
+$ roslaunch nextage_ros_bridge nextage_ros_bridge_real.launch nameserver:=%HOSTNAME% (NEXTAGE OPEN)
+```
+
+ROSのノードが動作しているかを確認してみます.
+
+```
+$ rosnode list
+/diagnostic_aggregator
+/hrpsys_profile
+/hrpsys_ros_diagnostics
+/hrpsys_state_publisher
+/rosout
+```
+
+#### iPython ターミナルの実行
+
+インタラクティブにロボットを操作できるように iPython インタラクティブコンソールを実行します.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py -- --host hiro014 (HIRO)
+
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py -- --host nextage101 (NEXTAGE OPEN)
+
+: (same initialization step as simulation)
+
+[hrpsys.py] initialized successfully
+```
+
+シミュレーションの場合は引数は不要です.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/hironx.py
+
+$ ipython -i `rospack find nextage_ros_bridge`/script/nextage.py
+```
+
+これらは RTM インタフェースの時と同じです.
+つまり `hironx.py` や `nextage.py` を実行したときに
+それらが RTM クライアントと ROS クライアントの両方を起動るということです.
+
+iPython コンソールを起動したときに次のようなエラーが出ることがあります.
+これは MoveIt! のサービスが起動していないという内容のエラーです.
+ROS クライアントメソッドのいくつかは MoveIt! が無くても動作しますので
+ここではこのエラーを無視しても大丈夫です.
+
+```
+:
+[hrpsys.py] initialized successfully
+[INFO] [WallTime: 1410918126.749067] [206.795000] Joint names; Torso: ['CHEST_JOINT0']
+ Head: ['HEAD_JOINT0', 'HEAD_JOINT1']
+ L-Arm: ['LARM_JOINT0', 'LARM_JOINT1', 'LARM_JOINT2', 'LARM_JOINT3', 'LARM_JOINT4', 'LARM_JOINT5']
+ R-Arm: ['RARM_JOINT0', 'RARM_JOINT1', 'RARM_JOINT2', 'RARM_JOINT3', 'RARM_JOINT4', 'RARM_JOINT5']
+[ERROR] [1410918130.900627643, 210.289999999]: Robot semantic description not found. Did you forget to define or remap '/robot_description_semantic'?
+[ INFO] [1410918130.900757547, 210.289999999]: Loading robot model 'HiroNX'...
+[ INFO] [1410918130.900794422, 210.289999999]: No root joint specified. Assuming fixed joint
+[FATAL] [1410918131.991522557, 211.249999999]: Group 'left_arm' was not found.
+[ERROR] [WallTime: 1410918132.006310] [211.285000] Group 'left_arm' was not found.
+Make sure you've launched MoveGroup (e.g. by launching moveit_planning_execution.launch)
+```
+
+#### ROS Python インタフェースコマンド
+
+実行している iPython コンソールから ROS Python インタフェースのコマンドを見てみます.
+次のように `ros.` と入力し TAB キーを押します.
+
+```python
+In [1]: ros.
+ros.Joint ros.get_joint ros.go_init
+ros.Link ros.get_joint_names ros.go_offpose
+ros.get_current_state ros.get_link ros.has_group
+ros.get_current_variable_values ros.get_link_names ros.set_joint_angles_deg
+ros.get_default_owner_group ros.get_planning_frame ros.set_joint_angles_rad
+ros.get_group ros.get_root_link ros.set_pose
+ros.get_group_names ros.goInitial
+```
+
+`ROS_Client` は `ros` というオブジェクトから利用することができます.
+
+`ROS_Client` は MoveIt! から RobotCommander を継承するしていて,
+その派生クラスから多くのメソッドが上記のように見えているのです.
+加えて `goInitial`,`go_init`, `go_offpose`, `set_pose` などの `ROS_Client` 用にいくつかのメソッドが実装されています.
+これらのメソッドはすべて RTM バージョン の Hironx/NEXTAGE OPEN Python インターフェイスと同等のものです.
+
+次のコマンドでロボットの全関節が初期姿勢に移行します.
+
+- 注意-1: コマンドを実行するとロボットが動きます.
+- 注意-2: 緊急停止スイッチをいつでも押せる状態にしておいてください.
+
+```python
+In [1]: ros.go_init()
+[INFO] [WallTime: 1410918153.591171] [226.790000] *** go_init begins ***
+[INFO] [WallTime: 1410918165.419528] [233.825000] wait_for_result for the joint group rarm = True
+[INFO] [WallTime: 1410918165.423372] [233.825000] [positions: [0.010471975511965976, 0.0, -1.7453292519943295, -0.26529004630313807, 0.16406094968746698, -0.05585053606381855]
+velocities: []
+accelerations: []
+effort: []
+time_from_start:
+ secs: 7
+ nsecs: 0]
+```
+
+iPython の機能を使うと RTM の場合と同様に各 ROS Python インタフェースコマンドのAPIドキュメントを見ることができます.
+
+```python
+In [2]: ros.go_init?
+Type: instancemethod
+Base Class:
+String Form:>
+Namespace: Interactive
+File: /home/rosnoodle/cws_hiro_nxo/src/start-jsk/rtmros_hironx/hironx_ros_bridge/src/hironx_ros_bridge/ros_client.py
+Definition: ros.go_init(self, task_duration=7.0)
+Docstring:
+Init positions are taken from HIRONX.
+TODO: Need to add factory position too that's so convenient when
+ working with the manufacturer.
+@type task_duration: float
+```
+
+RTM Python インタフェースとの互換性により,
+同等の機能を持つメソッドの名前が違っていても(`goInitial`)同じでもどちらでも利用することができます.
+
+```python
+IN [3]: ros.goInitial?
+Type: instancemethod
+String Form:>
+File: /home/n130s/link/ROS/indigo_trusty/cws_hironxo/src/start-jsk/rtmros_hironx/hironx_ros_bridge/src/hironx_ros_bridge/ros_client.py
+Definition: ros.goInitial(self, init_pose_type=0, task_duration=7.0)
+Docstring:
+This method internally calls self.go_init.
+
+This method exists solely because of compatibility purpose with
+hironx_ros_bridge.hironx_client.HIRONX.goInitial, which
+holds a method "goInitial".
+
+@param init_pose_type:
+ 0: default init pose (specified as _InitialPose)
+ 1: factory init pose (specified as _InitialPose_Factory)
+```
+
+
+### ROS Python インタフェースプログラミング
+
+#### サンプルコード - Acceptance Test (ROS)
+
+"RTM Python インタフェースプログラミング" の
+"サンプルコード - Acceptance Test (RTM)" におけるプログラムと同様のサンプルコードを見てみます.
+このプログラムは RTM クライアントで行ったことと同じタスクを ROS クライアントで行っています.
+
+##### acceptancetest_ros.py
+
+ROS の Python サンプルコード acceptancetest_ros.py は次のようになっています.
+
+- https://raw.githubusercontent.com/start-jsk/rtmros_hironx/9d7c2b1d801450b09e814b12093e1cf1986b5565/hironx_ros_bridge/src/hironx_ros_bridge/testutil/acceptancetest_ros.py
+
+```python
+1 # -*- coding: utf-8 -*-
+2
+3 # Software License Agreement (BSD License)
+4 #
+5 # Copyright (c) 2014, TORK (Tokyo Opensource Robotics Kyokai Association)
+6 # All rights reserved.
+7 #
+8 # Redistribution and use in source and binary forms, with or without
+9 # modification, are permitted provided that the following conditions
+10 # are met:
+11 #
+12 # * Redistributions of source code must retain the above copyright
+13 # notice, this list of conditions and the following disclaimer.
+14 # * Redistributions in binary form must reproduce the above
+15 # copyright notice, this list of conditions and the following
+16 # disclaimer in the documentation and/or other materials provided
+17 # with the distribution.
+18 # * Neither the name of TORK. nor the
+19 # names of its contributors may be used to endorse or promote products
+20 # derived from this software without specific prior written permission.
+21 #
+22 # THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
+23 # "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
+24 # LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
+25 # FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
+26 # COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
+27 # INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
+28 # BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
+29 # LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
+30 # CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
+31 # LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
+32 # ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
+33 # POSSIBILITY OF SUCH DAMAGE.
+34
+35 import rospy
+36
+37 from hironx_ros_bridge.testutil.abst_acceptancetest import AbstAcceptanceTest
+38
+39
+40 class AcceptanceTestROS(AbstAcceptanceTest):
+41
+42 def __init__(self, robot_client):
+43 '''
+44 @type robot_client: hironx_ros_bridge.ros_client.ROS_Client
+45 '''
+46 self._robotclient = robot_client
+47
+48 def go_initpos(self, default_task_duration=7.0):
+49 self._robotclient.go_init(default_task_duration)
+50
+51 def set_joint_angles(self, joint_group, joint_angles, msg_tasktitle=None,
+52 task_duration=7.0, do_wait=True):
+53 '''
+54 @see: AbstAcceptanceTest.move_armbyarm_impl
+55 '''
+56 rospy.loginfo("'''{}'''".format(msg_tasktitle))
+57 self._robotclient.set_joint_angles_deg(
+58 joint_group, joint_angles, task_duration, do_wait)
+59
+60 def set_pose(self, joint_group, posision, rpy, msg_tasktitle=None,
+61 task_duration=7.0, do_wait=True, ref_frame_name=None):
+62 '''
+63 @see: AbstAcceptanceTest.set_pose
+64 '''
+65 rospy.loginfo('ROS {}'.format(msg_tasktitle))
+66 self._robotclient.set_pose(joint_group, posision, rpy, task_duration,
+67 do_wait, ref_frame_name)
+68
+69 def set_pose_relative(
+70 self, joint_group, dx=0, dy=0, dz=0, dr=0, dp=0, dw=0,
+71 msg_tasktitle=None, task_duration=7.0, do_wait=True):
+72 rospy.logerr('AcceptanceTestROS; set_pose_relative is not implemented yet')
+73 pass
+```
+
+最初に ROS_Client クラスのインスタンス化が必要ですが,
+それは上記のコードの外側,[acceptancetest_hironx.py 内](https://github.com/start-jsk/rtmros_hironx/blob/be5fb8d5a5b8339d9507f3c287edb406ca48c9c9/hironx_ros_bridge/scripts/acceptancetest_hironx.py#L103)で次のように行われています.
+
+```python
+self._robotclient = ROS_Client()
+```
+
+上記のコードに戻ります.
+初期姿勢へ動くのは簡潔に1行で書かれています.
+
+```python
+48 def go_initpos(self, default_task_duration=7.0):
+49 self._robotclient.go_init(default_task_duration)
+```
+
+各関節を角度指示を与えるのも1行で書かれています.
+
+```python
+51 def set_joint_angles(self, joint_group, joint_angles, msg_tasktitle=None, task_duration=7.0, do_wait=True):
+:
+57 self._robotclient.set_joint_angles_deg(joint_group, joint_angles, task_duration, do_wait)
+```
+
+直交座標系における姿勢指示も行うことができます.
+(このコマンドでは MoveIt! サービスを利用しています)
+
+```python
+60 def set_pose(self, joint_group, posision, rpy, msg_tasktitle=None, task_duration=7.0, do_wait=True, ref_frame_name=None):
+:
+66 self._robotclient.set_pose(joint_group, posision, rpy, task_duration, do_wait, ref_frame_name)
+```
+
+##### サンプルコードの実行
+
+iPython コンソールから ROS クライアントを利用した `acceptance.run_tests_ros()` を実行して
+どのように動作しているかを確認してみます.
+
+- 注意: ロボットが動きます.
+
+```
+$ ipython -i `rospack find hironx_ros_bridge`/scripts/acceptancetest_hironx.py -- --host %HOSTNAME%
+:
+IN [1]: acceptance.run_tests_ros()
+```
+
+