Понятия, необходимые для выполнения задания:
- Евклидова плоскоть
- Бинарное дерево поиска
- Итератор
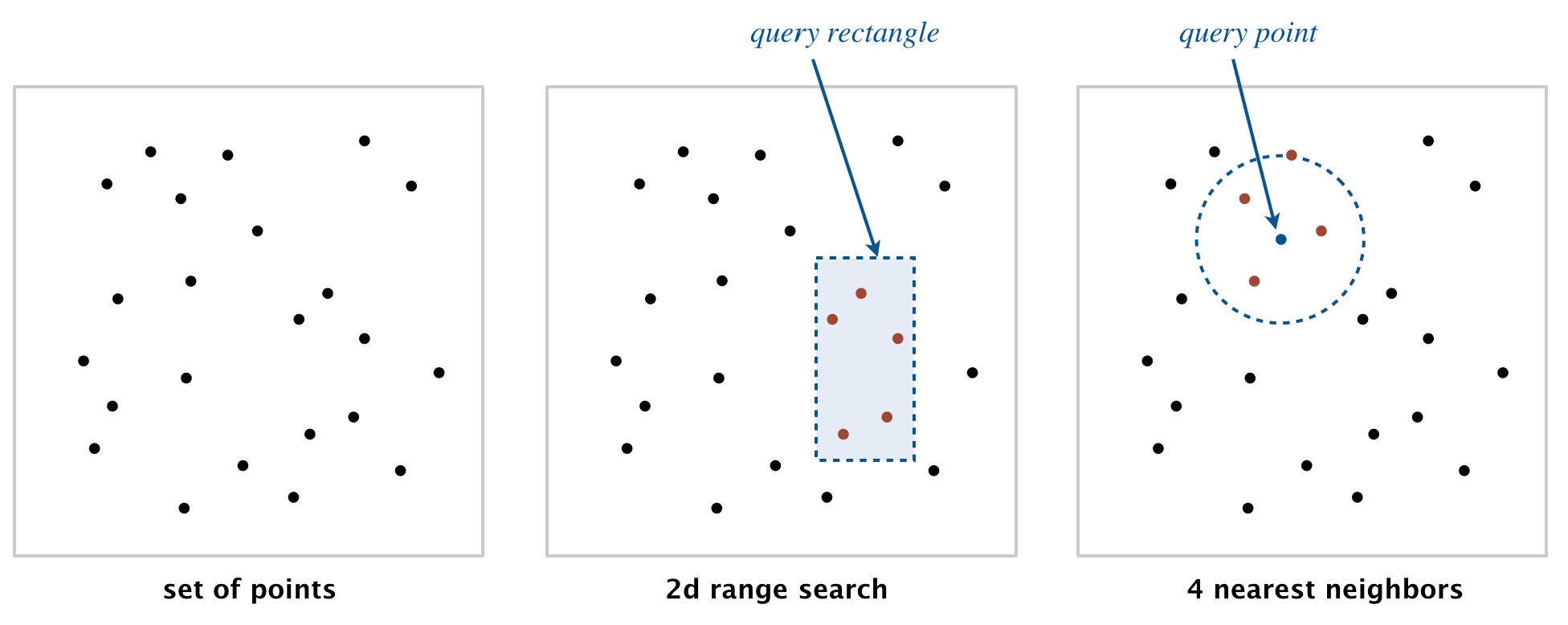
На двумерной евклидовой плоскости расположены N точек.
Дан произвольный прямоугольник (x0, y0), (x1, y1). Из N точек необходимо выбрать все точки, которые попали внутрь этого прямоугольника.
Дана произвольная точка А (xA, yA). Из N точек необходимо найти ближайшую к А точку.
Для решения задач необходимо реализовать класс для хранения точек на плоскости:
class PointSet {
public:
class iterator
{
using iterator_category = std::forward_iterator_tag;
// To do
};
PointSet(const std::string filename = {});
bool empty() const;
std::size_t size() const;
void put(const Point &);
bool contains(const Point &) const;
// second iterator points to an element out of range
std::pair<iterator, iterator> range(const Rect &) const;
iterator begin() const;
iterator end() const;
std::optional<Point> nearest(const Point &) const;
friend std::ostream & operator <<(const PointSet&);
};
А также классы Point и Rect:
class Point {
public:
Point(double x, double y);
double x() const;
double y() const;
double distance(const Point &) const; // euclidian distance
bool operator< (const Point &) const;
bool operator> (const Point &) const;
bool operator<= (const Point &) const;
bool operator>= (const Point &) const;
bool operator== (const Point &) const;
bool operator!= (const Point &) const;
};
class Rect {
public:
Rect(const Point & left_bottom, const Point & right_top);
double xmin() const;
double ymin() const;
double xmax() const;
double ymax() const;
double distance(const Point &) const;
bool contains(const Point &) const;
bool intersects(const Rect &) const;
};
Используйте реализацию красно-чёрных деревьев из стандартной библиотеки(std::map, std::set) для реализации PointSet. Требования по производительности:
- Сложность методов
PointSet::put(const Point &)иPointSet::contains(const Point &)должна быть О(logN) - Сложность методов
PointSet::nearest(const Point &)иPointSet::range(const Rect &)должна быть O(N)
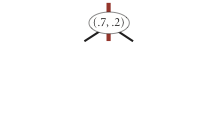
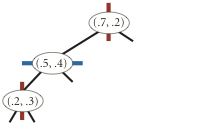
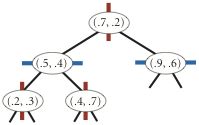
Реализуйте 2-d дерево (Kd tree). 2-d дерево это способ организации дерева поиска двумерных данных. Будем строить 2-d дерево на базе бинарного дерева поиска. Преимуществом организации 2-d дерева является возможность эффективно реализовать поиск точек в заданном прямоугольнике и поиск точки, ближайшей к заданной. Узлом 2-d дерева является точка на плоскости (x, y). При построении 2-d дерева сравнение нового узла (x1, y1) с текущим узлом (x, y) производится либо по координате x, либо по координате y, в зависимости от глубины узла в дереве. Корневой узел -- сравнение по X, узлы глубины 1 -- сравнение по Y, узлы глубины 2 -- сравнение по X, узлы глубины 3 -- сравнение по Y, и т.д.
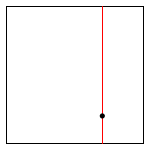
Добавление точки (0.7, 0.2)
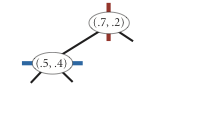
Добавление точки (0.5, 0.4)
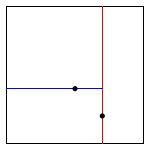
Добавление точки (0.2, 0.3)
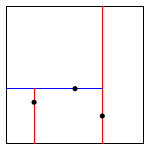
Добавление точки (0.4, 0.7)
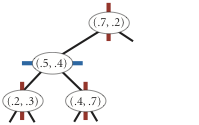
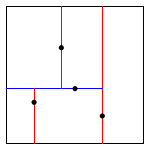
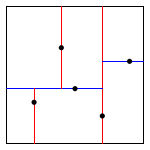
Добавление точки (0.9, 0.6)
Поиск точек, попавших в заданный прямоугольник. В эффективной реализации не следует рассматривать поддеревья, если соответствующий интервал прямоугольника (по X или Y) не пересекается с интервалом поддерева.
Поиск точки, ближайшей к заданной A(x, y). При обходе дерева необходимо хранить текущую наиближайшую точку Z (x0, y0), d = distance(A, Z). Если расстояние от прямоугольника поддерева больше, чем d, то это поддерево можно исключить из обхода. В эффективной реализации обхода дерева сначала следует выбирать то поддерево, в которое могла бы попасть точка A при добавлении в дерево.
Реализуйте
std::pair<iterator, iterator> PointSet::nearest(const Point & x, std::size_t k) const;
для поиска k ближайших к заданной точке x точек на плоскости.
PointSet::begin()должен реализовывать обход дерева в глубину.- Сбалансированность 2d дерева зависит от порядка добавления вершин-точек в дерево. На вход программы поступают точки в произвольном порядке, не гарантирующем построение сбалансированного 2d дерева.
- Предложенные интерфейсы классов Point, Rect и PointSet можно расширять, но нельзя изменять. Введение дополнительных пользовательских типов данных не ограничено.
- Данные могут быть загружены либо передачей файла в конструктор
PointSet::PointSet(const std::string & filename), либо с помощьюPointSet::put(Point). Формат файла: две колонки, координата X точки и координата Y точки, колонки разделены пробелом. Пример:
0.753 0.943
0.225 0.671
0.763 0.03
0.725 0.338
0.183 0.066
Задание следует выполнять последовательно: сначала реализовать Шаг 1, затем Шаг 2 и Шаг 3. После каждого шага следует запускать тесты и проверять работоспособность текущей программы.
Производительность решения на базе 2d дерева должна быть на практике лучше, чем производительность решения на базе красно-черного дерева.