An enhanced version of Semantic Object Map (SOMA) package. SOMAs can include objects, regions of interest (ROI), and trajectories.
- MongoDB (>=2.6)
- mongodb_store - use the source version from github
- ROS's navigation stack (only map server)
- Qt5 (sudo apt-get install qtbase5-dev)
-
Start the ros core:
$ roscore -
Launch the ROS datacentre:
$ roslaunch mongodb_store mongodb_store.launch db_path:=<path_to_db>
- SOMA2 is currently based on the assumption that all the detected objects are in a 2D global map frame. So it is required to run the soma map manager for using SOMA2. This node is used for storing, reading and publishing 2D map:
$ rosrun soma_map_manager soma_map.py
If there are any stored 2D occupancy maps in the datacenter, then map manager will let you choose the map to be published. If not, it will wait for map_server. Run the map_server with a 2D map:
$ rosrun map_server map_server <map.yaml>
where map.yaml specifies the map you want to load. After running the map_server, you should save the published map using the SOMA map manager.
- If you want to check the published map, start RVIZ, add a Map display type and subscribe to the
soma2/maptopic:
$ rosrun rviz rviz
-
If you want to create SOMA ROIs, run the SOMA ROI manager:
$ rosrun soma_roi_manager soma_roi.py <config>
where config denotes an object configuration. By default, the configuration file soma_roi_manager/config/default.json is used to initialize the list of available ROI types. Alternatively, the following command can be used to use a different configuration file:
```
$ rosrun soma_roi_manager soma_roi.py -t /path/to/config/file <config>
```
2D map information will be gathered from soma2/map_info service of SOMA map manager.
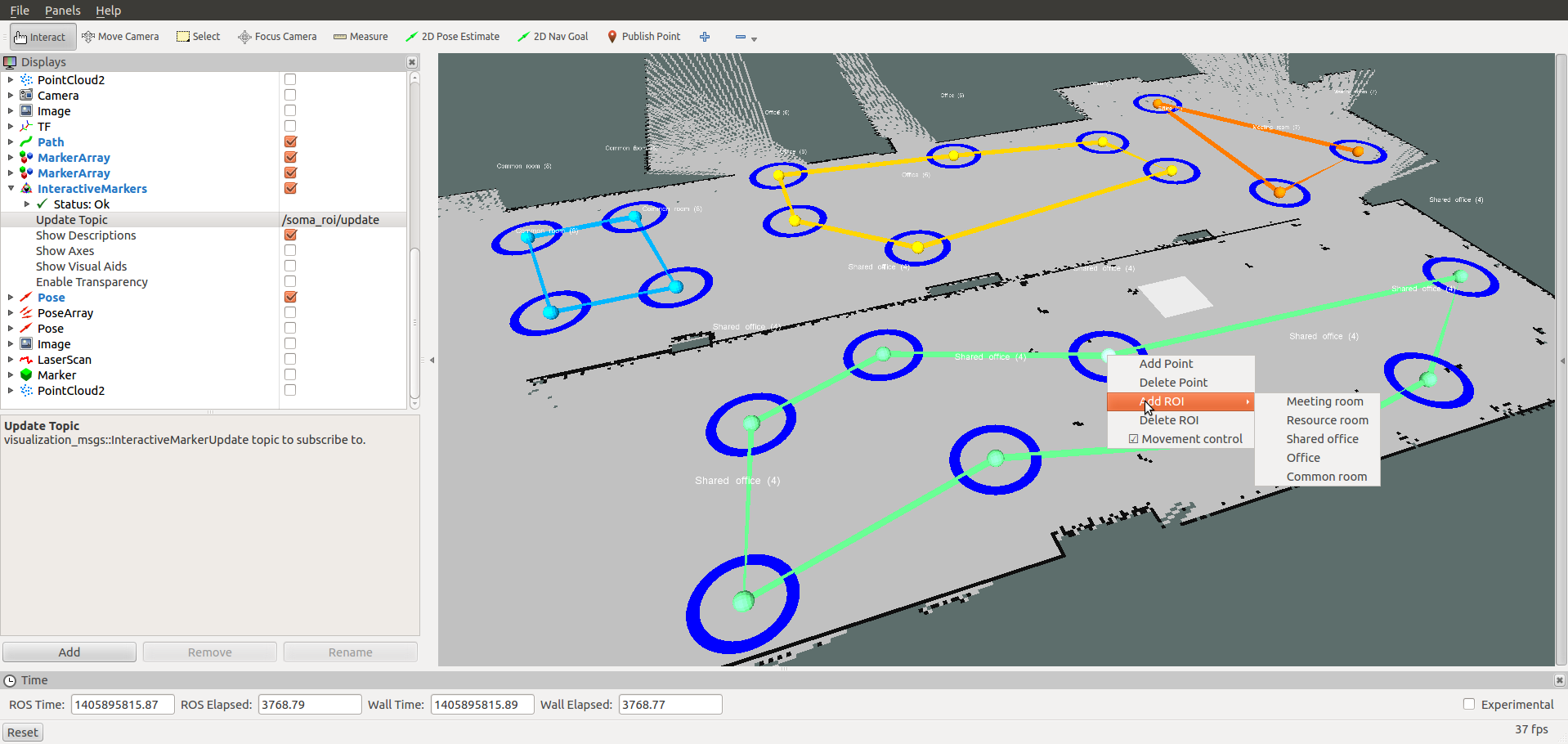
6. In RVIZ, add an InteractiveMarker display type, and subscribe to the /soma2_roi/update topic:
7. Add, delete, modify ROIs in RVIZ using the interactive marker and the context menu (right-mouse-click)
The other nodes can communicate with SOMA2 using the SOMA2 service calls. In order to use these services, one should run the soma data manager:
- Run the soma data manager:
$ rosrun soma_manager data_manager.py <db_name> <collection_name>
The parameters db_name and collection_name are optional which can be used to define the database and collection name for data storage.
One or multiple SOMA2 objects can be inserted using the SOMA2 service call /soma2/insert_objects. The unique mongodb ids and a boolean value are returned. The boolean return value determines whether the request was successfully completed or not.
One or multiple SOMA2 objects can be deleted using the SOMA2 service call /soma2/delete_objects. The SOMA2 object ids are used for deletion. The boolean return value determines whether the request was successfully completed or not.
A SOMA2 object can be updated using the SOMA2 service call /soma2/update_object. The boolean return value determines whether the request was successfully completed or not.
SOMA2 objects and ROIs could be queried using SOMA2 service call /soma2/query_db. The query request should be filled according to the spatio-temporal constraints. The results are returned based on the query type and constraints.