Home
ここでは、SIMVR向けアプリケーション開発についての使い方をまとめています。
初期セットアップからSIMVR動作までの流れを説明しています。
![]()
マニュアルは下記PDFを必ずご確認の上、安全にご利用ください。
ダウンロード:SIMVR_Manual.pdf
製品が足場ユニットにしっかりと着地している事をホームポジションと言います。このホームポジションになっている事を必ず確認してから製品に搭乗してください。


SIMVRには緊急停止ボタンが付属しています。このボタンを押すと、SIMVRへの電源供給を止めることが可能です。また、ゲーム側で緊急停止ボタンが押されたことを検知することもできます。

ボタンは押下するとロックされます。矢印の方向に回して、ロックを解除できます。


実機で稼働させるためにライセンス認証が必要です。開発用としてご購入いただいたお持ちのSIMVRでのみご利用が認められておりますので、別のSIMVRによるビジネスや展示会等でご利用の際は追加でライセンスが必要です。
開発しているアプリケーションを認証するにはSIMVRキーのオンライン発行でキーを取得してください。
- 動作させるSIMVRシリアル番号を確認します
- SIMVRシリアル番号を用いてSIMVRキーを発行しキー取得します。
- 開発しているアプリケーションも他者に提供する場合、ライセンス化可能ですので、必要に応じてアプリコードを入力してください。
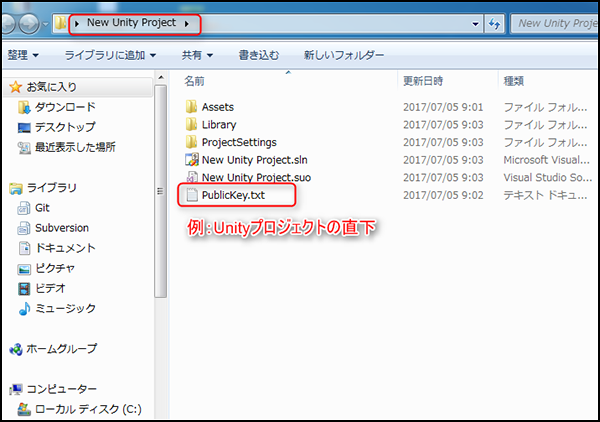
- ライセンスキーをテキストファイル化にして「PublicKey.txt」として名前を付けて保存します。
- 実行ファイルまたはプロジェクトファイルの直下にファイルを置きます。(常に置いておく必要があります。)
- プログラム実行してSIMVRとの認証ができれば完了です。
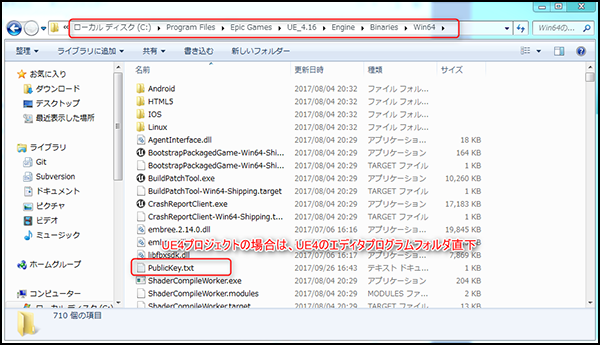
※UE4 64bit Editor :C:\Program Files\Epic Games\UE_4.16\Engine\Binaries\Win64\PublicKey.txt
※出力した実行ファイル(.exe)の場合は、大抵実行ファイルのディレクトリです。
※開発者ライセンスを受けていれば、通常SIMVR筐体にシリアル番号が記載しております。
SIMVRに与えるパラメータについての解説です。
| パラメータ | API | 解説 |
|---|---|---|
| SIMVR Status | GetState() | 現在接続しているSIMVRの状態を表示します。 ステータスパラメータは下記表をご確認ください。 |
| Enable Axis Processer | SetAxisProcessingMode() GetAxisProcessingMode() |
このチェックがついている状態ではSIMVR Controller Modeとなり Roll,Pitch,Yaw,Heave,Sway,Surgeの6軸を基本とした挙動を作成することができます。 チェックが外れている状態では、SIMVR Direct Position Modeとなり、Axis 1~4の直接制御を行います(非推奨) |
| Roll | SIMVRDataPacket.roll | SIMVR正面から見て、左右回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Pitch | SIMVRDataPacket.pitch | SIMVR正面から見て、前後回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Yaw | SIMVRDataPacket.yaw | SIMVR正面から見て、上下軸の回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Heave | SIMVRDataPacket.heave | 上下移動で上下にかかるGパラメータを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Sway | SIMVRDataPacket.sway | SIMVR正面から見て、左右Gパラメータを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Surge | SIMVRDataPacket.surge | SIMVR正面から見て、前後Gパラメータを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Enable Origin | SetOriginMode() GetAxisProcessingMode() |
チェックがついている間、SIMVRを強制的にホームポジションに設定します。 |
| Speed | SIMVRDataPacket.speedAxis123 | アクチュエータの速度を制御します。初期値は1.0,最小値0.05,最大値1.0です。 |
| Accelerate | SIMVRDataPacket.accelAxis123 | アクチュエータの加速度および減速度を制御します。初期値は0.5,最小値0.0,最大値1.0です。 |
| Speed Yaw | SIMVRDataPacket.speedAxis4 | この機能は廃止されました。互換のため存在。 |
| Accelerate Yaw | SIMVRDataPacket.accelAxis4 | この機能は廃止されました。互換のため存在。 |
| Rotation Motion Ratio | rotationMotionRatio | 回転パラメータに対して、どのくらい椅子傾きに反映させるかを設定します。初期値は0.8,最大値1.0,最小値0.0です。 |
| Gravity Motion Ratio | gravityMotionRatio | Gパラメータに対して、どのくらい傾きを利用した重力加速度に反映するかを設定します。初期値は0.8,最大値1.0,最小値0.0です。 SIMVR 6DOFの場合0.0にすることでパラメータに対して回転が掛からないようになります。 |
SIMVRの状態についての解説です。
| Enum値 | 整数値 | 解説 |
|---|---|---|
| ― | -1 | 何もしていません。 |
| Initial | 0 | 初期化しています。 |
| CanNotFindUsb | 1 | USBが接続されていません。 |
| CanNotFindSimvr | 2 | SIMVRが見つかりません。 |
| CanNotCalibration | 3 | SIMVRの原点復帰に失敗しました。 |
| TimeoutCalibration | 4 | SIMVRの原点復帰中にエラーが発生しました。 |
| Running | 5 | 正常動作中です。 |
| StopActuator | 6 | 一部のアクチュエータが停止してます。動作中です。 |
| ShutDownActuator | 7 | アクチュエータが停止してエラーが発生しました。 |
| Pause | 8 | 一時停止中です。 |
| CanNotCertificate | 9 | SIMVRの認証に失敗しました。 |
| CalibrationRetry | 10 | SIMVRの再度原点復帰中です。 |
またゲームエンジン内でユーティリティのスクリプトがこれらのパラメータを直接制御する場合がありますので、各種別途ご確認ください。

X [G] = accel * 0.25
X [mm/s] = speed * 100

Roll、PitchなどRotationで操作した場合は、逆向きの加速度成分が入ってしまいます。
Sway、SurgeなどGravityで操作した場合は、加速度成分の立ち上がりが早く、逆向きの成分が入ることは少なくなります。
傾きを利用した加速度を使用しない場合は、パラメータの「Gravity Motion Ratio」を0.0に設定してください。
開発方法を選択してご確認ください。