This repository has been archived by the owner on Feb 10, 2022. It is now read-only.
GEUnity
- Unity5以降をインストールします。Personal版も対応しております。https://unity3d.com/jp/get-unity/update
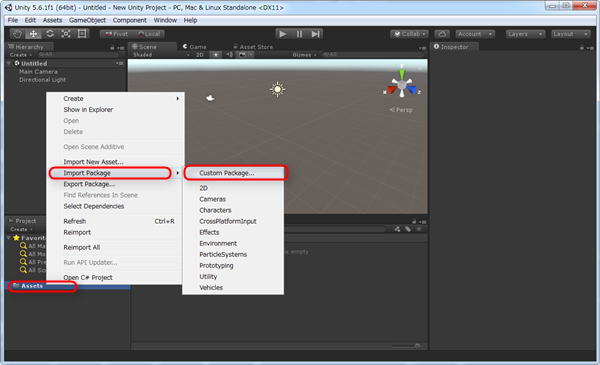
- UnityProjectのAssetウィンドウの
Assetsを右クリックしてコンテキストメニューのImport Package→Custom Packageをクリックします。
- ファイル選択ウィンドウからSIMVR-Tools内の
simvrsdk_unity.unitypackageを選択します。 - ファイルを全てインポートします。
- SIMVRを使えるようにするため、Unityエディタのメニューバーから
GameObject→SIMVR→add SIMVRSystem ObjectをクリックしてシーンにSIMVRSystemを追加します。

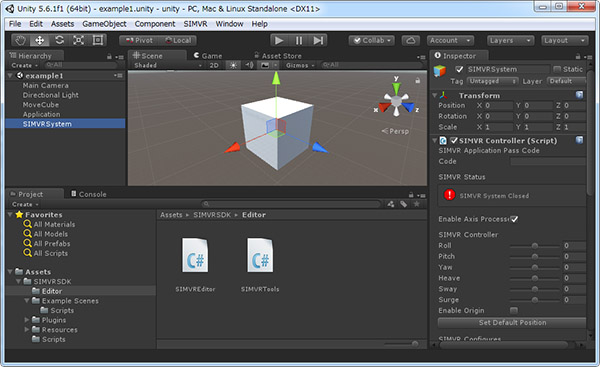
- ヒエアルキーにあるSIMVRSystemを選択してパラメータを調整します。Unity実行中でもパラメータは動的に調整可能です。

- Unityを実行して問題なく稼働するか確認します。
※SIMVRを実際に稼働させるためには、SIMVRを認証させる必要がありますので、こちらをご確認くださいませ。
| パラメータ名 | デフォルト | 解説 |
|---|---|---|
| AppCode | 空白 | ライセンス化するために任意のアプリのコードを入力します。※シリアル番号ではありません。 |
| SIMVR Status | 0.0 | ステータス |
| Enable Axis Processer | true | falseにするとシリンダ番号で設定できます。 |
| Roll | 0.0 | SIMVR正面から見て、左右回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Pitch | 0.0 | SIMVR正面から見て、前後回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Yaw | 0.0 | SIMVR正面から見て、上下軸の回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| Heave | 0.0 | 上下移動で上下Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Sway | 0.0 | SIMVR正面から見て、左右回転で左右Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Surge | 0.0 | SIMVR正面から見て、前後回転で前後Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| Enable Origin | false | チェックがついている間、SIMVRを強制的にホームポジションに設定します。 |
| Speed | 1 | 4本のシリンダのうち、縦に伸びている3本のシリンダの速度を制御します。初期値は1.0,最小値0.0,最大値1.0です。 |
| Accelerate | 0.5 | シリンダの加速度および減速度を制御します。初期値は0.5,最小値0.0,最大値1.0です。 |
| Speed Yaw | - | この機能は廃止されました。 |
| Accelerate Yaw | - | この機能は廃止されました。 |
| Rotation Motion Ratio | 0.8 | 回転パラメータに対して、どのくらい椅子傾きに反映させるかを設定します。初期値は0.8,最大値1.0,最小値0.0です。 |
| Gravity Motion Ratio | 0.8 | Gパラメータに対して、どのくらい傾きを利用した重力加速度に反映するかを設定します。初期値は0.8,最大値1.0,最小値0.0です。 SIMVR 6DOFの場合0.0にすることでパラメータに対して回転が掛からないようになります。 |
「Set Default * 」ボタンを押すと値がデフォルトにリセットされます。
設定されたオブジェクトの動きを監視し、動きに応じて自動計算・SIMVR動作反映を行います。
| パラメータ名 | デフォルト | 解説 |
|---|---|---|
| Tracking Object | 空白 | 追従・計算をさせるオブジェクトを指定します。 |
| UpdateTime | 0.5 | 動きの状態を計算するための間隔をミリ秒で指定します。 |
| WScale | 1.0,1.0,1.0 | ワールド座標系メートル値です。1.0=1m |
| Roll Force | 0.0 | SIMVR正面から見て、強制的に左右回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| PitchForce | 0.0 | SIMVR正面から見て、強制的に前後回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| YawForce | 0.0 | SIMVR正面から見て、強制的に上下軸の回転を制御します。初期値は0.0、最小値-1.0,最大値1.0です。 |
| HeaveForce | 0.0 | 強制的に上下移動で上下Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| SwayForce | 0.0 | SIMVR正面から見て、強制的に左右回転で左右Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
| SurgeForce | 0.0 | SIMVR正面から見て、強制的に前後回転で前後Gを制御します。初期値は0.0,最小値-1.0,最大値1.0です。 |
SIMVRの状態を監視して、イベントが発生したときに呼び出される関数群です。