AliOS Things 3.0 AT模组驱动一站式开发指南
Table Of Content
- 4.1 串口和AT命令特征配置
- 4.2 添加at设备
- 4.3 HAL接口实现
- 4.4 atparser使用指南
- 4.5 特别提醒
- 5.1 menuconfig集成
- 5.2 C源码集成
- 5.3 Makefile集成
- 5.4 板级集成
- 6.1 硬件准备
- 6.2 测试app开发/添加
- 6.3 在app中完成模组设备添加
- 6.4 使能board外挂模组的串口
- 6.5 配置、编译和运行
本文适用于使用MCU外挂AT模组方式接入AliOS Things和阿里云物联网平台的用户。本文的目标是为模组对接用户提供完整、详细的指导说明,使用户在只参考本文的情况下,能快速完成广域网模组的接入。
本文将介绍AliOS Things的AT模组SAL驱动架构,详细讲述进行AT模组SAL驱动对接的步骤和流程,包括源码获取、工具安装、SAL脚手架的使用、AT模组对接和集成、测试与验证等。本文中所列举的示例,均基于stm32f103rb-nucleo(MCU)+ m5310a(NBIoT模组)的平台组合。
SAL,是Socket Adapter Layer的简称。AliOS Things中SAL套件基于外挂AT模组的方式,提供标准Socket接口服务。SAL套件提供AT命令到Socket标准接口的转换。借助SAL套件,用户不用感知底层通信方式和介质(如WiFi、2G、4G等模组),可以使用标准Socket接口进行应用开发,使上层应用具有更好的可移植性。
下图是AliOS Things中SAL套件的架构示意图。
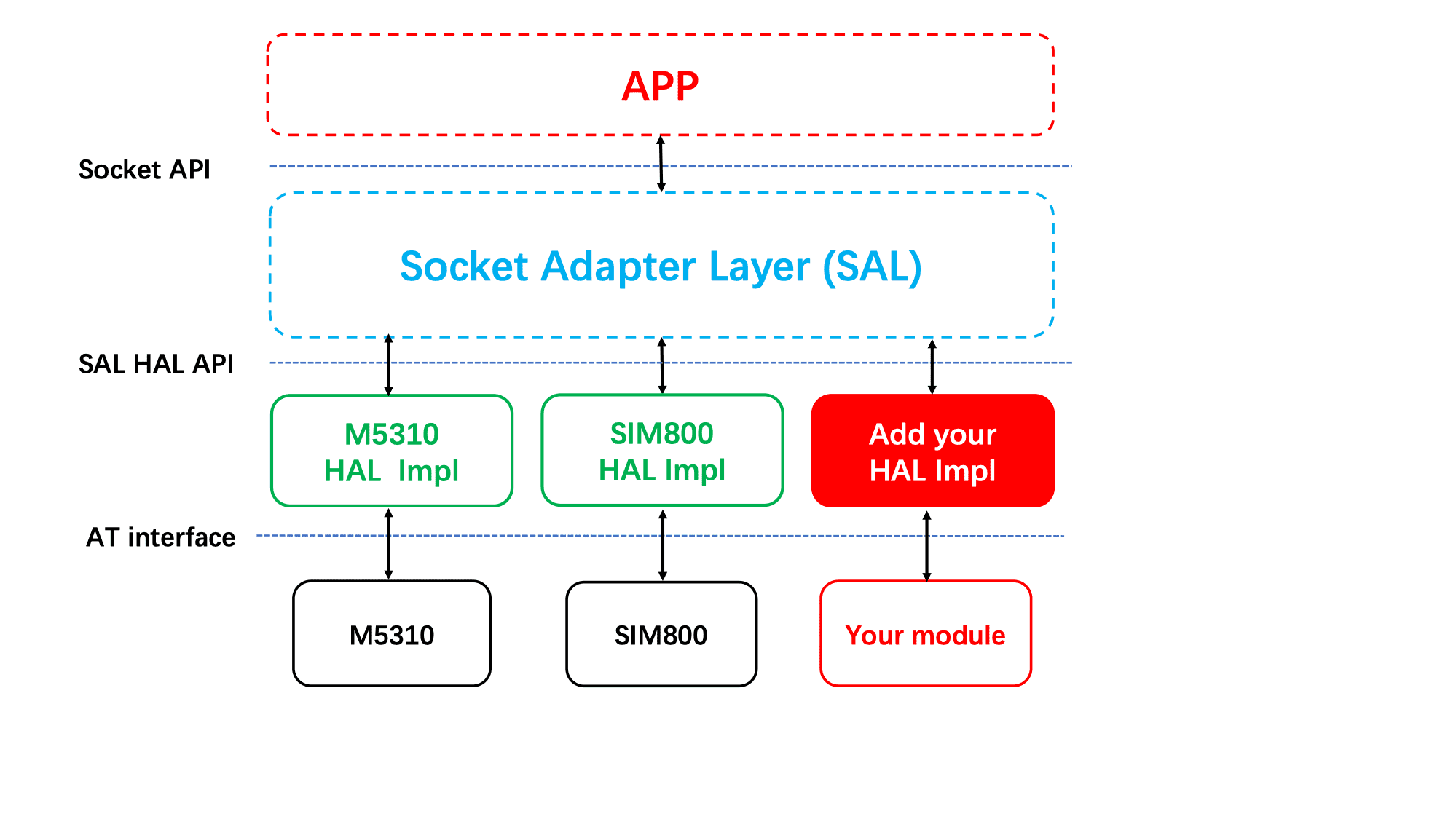
- SAL Core:由AliOS Things提供,SAL核心组件。主要包括Socket连接管理、数据缓存、协议转换等功能,对上提供标准Socket接口服务,对下提供统一的HAL接口规范(可以对接到不同厂商的AT模组)。
- SAL Driver:驱动,部分(市场TOP系列)由AliOS Things提供,其他由用户自己提供。SAL驱动模块基于具体型号的通信模组提供的AT命令,实现SAL规范的HAL接口功能。
API包括:
- Socket API:这一层接口提供标准的socket服务,请参考socket接口手册。SAL提供的socket服务是标准socket服务的子集,其中TCP client相关的接口一般都支持,但TCP server、UDP client等相关的接口支持与否,视具体模组而定。
- SAL HAL API:这一层接口定义SAL核心模块与不同厂商模组驱动之间的统一界面。这一层HAL的对接是模组驱动接入中的主要工作。
- AT Interface:这一层用于处理AT交互,如AT命令收发、事件回调。对应地,AliOS Things提供了atparser组件供用户选择使用,后续章节会有详细介绍。
模组的SAL驱动,提供SAL规范的HAL接口的具体实现。SAL HAL提供统一规范的接口,模组驱动提供不同模组的具体实现,从而实现SAL对各厂商不同模组的支持。
SAL驱动主要实现类似Socket数据发送、数据接收、域名/IP转换这样的功能。AliOS Things中提供了不同类型模组(WiFi、2G、4G等)的参考实现,用户可以参考这些示例进行自己模组的对接。
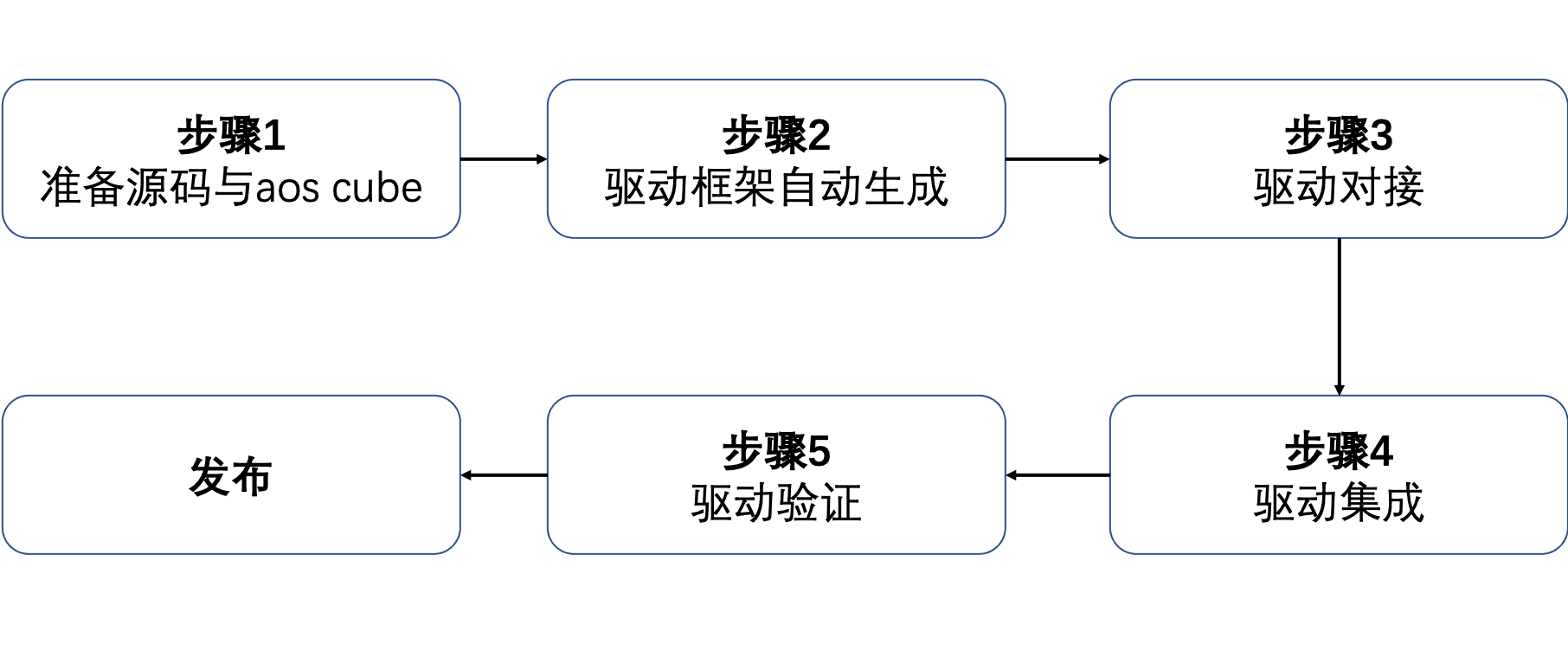
SAL驱动的对接和集成的细节,在后续章节中介绍,可以分为5个步骤。
本文的介绍和示例,都基于AliOS Things 3.0版本代码和编译工具。用户在对接和集成模组驱动之前,需要准备好AliOS Things的代码和配套工具。如果用户需要运行本文介绍的示例驱动,还需要准备好stm32f103rb-nucleo(MCU)+ m5310a(NBIoT模组)硬件组合、固件及烧录工具等。
- 从Github获取AliOS Things源码,适用版本为dev_sal_driver,该版本为基于rel_3.0.0的分支。
- 安装aos-cube工具,请参考这里。
以下章节讲详细介绍如何对接和集成一个新的模组驱动。
为简化SAL驱动的开发,AliOS Things配套的aos-cube工具,提供了自动生成模组驱动目录和框架的功能,使用户可以快速进入驱动的实现环节。 参考以下命令,快速生成SAL驱动目录和框架:
$ cd <aos源码目录>
$ aos create saldriver <module_name> -t <module_type>
[Info] Drivers Initialized at: /<path_to_aos_src>/drivers/sal/<module_type>/<module_name> 其中,module_name是模组的名称,如mk3060(庆科WiFi模组)、m5310a(中移物联网NBIoT模组)等;module_type为模组类型(如wifi、gprs、lte)。
目前支持的SAL外接AT模组的类型包括:
- wifi(参考drivers/sal/wifi/bk7231/)
- gprs(参考drivers/sal/gprs/sim800/)
- lte(参考drivers/sal/lte/m02h)
备注:AliOS Things中即将推出NBIoT类型模组的支持,敬请期待。目前AliOS Things 3.0配套的工具和模版还不支持NBIoT类型模组,用户如有需要,可以临时选用其他类型进行对接(模组类型目前只起归类划分的作用,不影响驱动的具体实现)。
以m5310a模组为例:
$ cd ~/src/AliOS-Things
$ aos create saldriver m5310a -t nbiot
[Info] Drivers Initialized at: ~/src/AliOS-Things/drivers/sal/nbiot/m5310a
$ tree drivers/sal/nbiot/m5310a/
drivers/sal/nbiot/m5310a/
├── aos.mk
├── atcmd_config_module.h
├── Config.in
├── m5310a.c
└── README.md
0 directories, 5 files备注:由于脚手架工具暂时不支持nbiot类型,建议用户使用lte类型自动生成框架,然后通过目录/文件重命名产生nbiot/m5310a驱动目录及文件。具体操作步骤如下:
$ aos create saldriver m5310a -t gprs
$ mkdir -p drivers/sal/nbiot/
$ mv drivers/sal/gprs/m5310a drivers/sal/nbiot/
$ sed -i '/.*m5310a.*/d' drivers/sal/gprs/Config.in
$ cp drivers/sal/gprs/Config.in drivers/sal/nbiot/
$ sed -i 's/gprs/nbiot/g' drivers/sal/nbiot/Config.in
$ sed -i 's/GPRS/NBIOT/g' drivers/sal/nbiot/Config.in
$ sed -i 's/SIM800/M5310A/g' drivers/sal/nbiot/Config.in
$ sed -i 's/sim800/m5310a/g' drivers/sal/nbiot/Config.in本节介绍如何完成模组驱动的对接和开发。
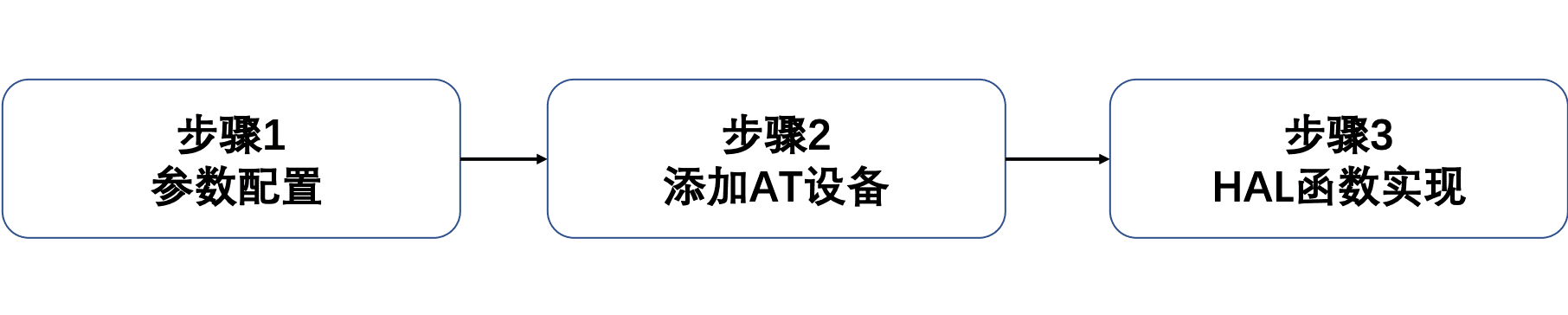
在驱动目录和框架生成之后,用户需要对其中某些文件进行填充、修改和接口实现,主要是基于自身模组AT提供的功能和操作,实现SAL HAL规范的接口。
本章节中红色字体部分,是需要重点关注的信息。
如果使用了at parser组件来与模组进行AT交互,需要把串口的配置、AT指令配置等参数传给atparser组件。串口的配置,包括串口波特率、校验方式等参数的配置;AT命令的配置,包括命令发送结束符、命令回复特征等配置。这些配置项,需要在驱动对接时,通过at_add_dev()函数调用传递给atparser模块,atparser组件将他们用于AT命令收发控制的特征提取。
这些配置项的定义,一般放在驱动目录下,如drivers/sal/nbiot/m5310a/atcmd_config_module.h文件中,其中宏名称建议(但不是必须)采用以下表格中所列的,宏定义的值由用户根据自身模组的情况进行修改。
建议宏名称如下:
| 宏名称 | 含义 | 说明 |
|---|---|---|
| AT_RECV_PREFIX | AT接收结束符。 | 一般是回车加换行。 |
| AT_RECV_SUCCESS_POSTFIX | AT命令成功的回复。 | 一般是“OK\r\n”。 |
| AT_RECV_FAIL_POSTFIX | AT命令失败的回复。 | 一般是“ERROR\r\n”。 |
| AT_SEND_DELIMITER | AT命令+数据发送时二者之间的分隔符,根据模组需要,可选。 | 例如“\r”。 |
| AT_UART_BAUDRATE | 串口波特率 | 如9600,115200等。 |
| AT_UART_DATA_WIDTH | 串口数据位宽 | 该宏的取值需要用AliOS Things中aos/hal/uart.h中定义的值,如DATA_WIDTH_8BIT。 |
| AT_UART_PARITY | 串口校验 | 同上。 |
| AT_UART_STOP_BITS | 串口停止位 | 同上。 |
| AT_UART_FLOW_CONTROL | 串口数据流控 | 同上。 |
| AT_UART_MODE | 串口工作模式 | 同上。 |
以m5310a模组为例的完整示例:
/*
* Copyright (C) 2015-2017 Alibaba Group Holding Limited
*/
#ifndef _ATCMD_CONFIG_MODULE
#define _ATCMD_CONFIG_MODULE
#include "aos/hal/uart.h"
/* prefix postfix delimiter */
#define AT_RECV_PREFIX "\r\n"
#define AT_RECV_SUCCESS_POSTFIX "OK\r\n"
#define AT_RECV_FAIL_POSTFIX "ERROR\r\n"
#define AT_SEND_DELIMITER "\r"
/* uart config */
#define AT_UART_BAUDRATE 9600
#define AT_UART_DATA_WIDTH DATA_WIDTH_8BIT
#define AT_UART_PARITY NO_PARITY
#define AT_UART_STOP_BITS STOP_BITS_1
#define AT_UART_FLOW_CONTROL FLOW_CONTROL_DISABLED
#define AT_UART_MODE MODE_TX_RX
typedef struct {
uart_dev_t uart_dev;
} sal_device_config_t;
#endifSAL设备添加处理,该函数添加该模组为SAL处理设备。在该函数中,通过at_init和at_add_dev接口向系统注册该AT模组设备。如果调用者通过data参数传入了SAL设备配置参数,则应该使用传入的参数进行设备添加操作,否则采用默认的参数(由对接层自己定义)进行设备添加。
以m5310a模组为例,下面是m5310a模组的m5310a_sal_add_dev接口的实现片段:
static int m5310a_sal_add_dev(void* data)
{
at_config_t at_config = { 0 };
/*
* 如果用户传入的配置信息,则使用用户指定的参数,
* 否则不使用默认的(如果没有默认的,则提示错误信息)。
*/
if(data != NULL) {
sal_device_config_t* config = (sal_device_config_t *)data;
uart_dev.port = config->uart_dev.port;
uart_dev.config.baud_rate = config->uart_dev.config.baud_rate;
uart_dev.config.data_width = config->uart_dev.config.data_width;
uart_dev.config.parity = config->uart_dev.config.parity;
uart_dev.config.stop_bits = config->uart_dev.config.stop_bits;
uart_dev.config.flow_control = config->uart_dev.config.flow_control;
uart_dev.config.mode = config->uart_dev.config.mode;
} else {
/* uart_dev should be maintained in whole life cycle */
uart_dev.port = AT_UART_PORT;
uart_dev.config.baud_rate = AT_UART_BAUDRATE;
uart_dev.config.data_width = AT_UART_DATA_WIDTH;
uart_dev.config.parity = AT_UART_PARITY;
uart_dev.config.stop_bits = AT_UART_STOP_BITS;
uart_dev.config.flow_control = AT_UART_FLOW_CONTROL;
uart_dev.config.mode = AT_UART_MODE;
}
/* 调用at_init初始化atparser模块。 */
at_init();
/* configure and add one uart dev */
at_config.type = AT_DEV_UART;
at_config.port = uart_dev.port;
at_config.dev_cfg = &uart_dev;
at_config.send_delimiter = AT_SEND_DELIMITER;
at_config.reply_cfg.reply_prefix = AT_RECV_PREFIX;
at_config.reply_cfg.reply_success_postfix = AT_RECV_SUCCESS_POSTFIX;
at_config.reply_cfg.reply_fail_postfix = AT_RECV_FAIL_POSTFIX;
/* 调用at_add_dev添加AT设备。 */
if ((at_dev_fd = at_add_dev(&at_config)) < 0) {
M5310A_LOGE(TAG, "AT parser device add failed!\n");
return -1;
}
return 0;
}这部分工作主要是对接实现SAL组件定义的几个HAL接口,这些接口将被SAL调用。模组对接时,需要提供这些HAL接口的实现,然后集成到SAL框架中。本章节将介绍HAL接口定义,以具体示例展示如何进行HAL对接。
根据前述章节的介绍,通过aos_cube工具生成驱动框架后,HAL接口的对接工作主要在drivers/sal/<module_type>/<module_name>/<module_name>.c文件中,以下是工具生成的驱动HAL接口相关的代码:
/* Don't modify */
static sal_op_t sal_op = {
.next = NULL,
.version = "1.0.0",
.name = "m5310a",
.add_dev = m5310a_sal_add_dev,
.init = HAL_SAL_Init,
.start = HAL_SAL_Start,
.send_data = HAL_SAL_Send,
.domain_to_ip = HAL_SAL_DomainToIp,
.finish = HAL_SAL_Close,
.deinit = HAL_SAL_Deinit,
.register_netconn_data_input_cb = HAL_SAL_RegisterNetconnDataInputCb,
};HAL对接,即实现上述结构体中定义的几个接口函数,包括HAL_SAL_Init、HAL_SAL_Start、HAL_SAL_Send、HAL_SAL_DomainToIp、HAL_SAL_Close、HAL_SAL_Deinit、HAL_SAL_RegisterNetconnDataInputCb。
以下是每个HAL接口需要实现的功能和要求介绍(同时附带m5310a的实例展示):
-
HAL_SAL_Init
- 申请操作AT模组所需的相关系统资源,如锁、信号量等;取决于自身驱动实现的需求。
- 初始化AT模组,如关闭回显、设置波特率、关闭流控、等待网络连接等。需要根据各模组的特点和要求采取相应的初始化逻辑,目标是通过完成该函数调用后,AT模组可以正常使用。
- AT事件(如数据到达、WiFi连接/断开等事件)处理函数注册(通过at_register_callback接口),最少需要注册Socket数据接受处理函数,后续需要在有数据到达时,通过
HAL_SAL_RegisterNetconnDataInputCb接口注册的回调函数,将数据送至上层进行处理。此外,在AT模组获取到IP地址后,对接层需要通过aos_post_event接口向上层通知CODE_WIFI_ON_GOT_IP事件。 - 以m5310a模组为例,下面是m5310a模组的HAL_SAL_Init接口的实现和注释说明:
static int HAL_SAL_Init(void)
{
// ...
/* 锁、信号量等资源申请 */
if (0 != aos_mutex_new(&g_link_mutex)) {
M5310A_LOGE(TAG, "Creating link mutex failed (%s %d).", __func__, __LINE__);
return -1;
}
// ...
/*
* g_link结构体初始化,用于存放socket连接相关的信息,
* 如对应的socket fd、at fd,socket类型,远端信息等。
*/
memset(g_link, 0, sizeof(g_link));
for (link_id = 0; link_id < LINK_ID_MAX; link_id++) {
g_link[link_id].fd = -1;
g_link[link_id].at_fd = -1;
g_link[link_id].socktype = M5310A_SOCK_UNKNOWN;
}
/* 注册AT事件回调处理函数 */
at_register_callback(at_dev_fd, M5310A_SOCKET_DATA_EVENT_PREFIX, NULL,
NULL, 0, m5310a_socket_data_event_handler, NULL);
// ...
/* 以下是模组的初始化操作,包括等待模组ready、功能设置、网络连接、信号强度检测。 */
ret = m5310a_net_attach(1);
if (ret) {
M5310A_LOGE(TAG, "%s failed to setup network, ret: %d", __func__, ret);
goto err;
}
// ...
err:
return ret;
}其中,m5310a_net_attach进行模组初始化操作,在m5310a.c中定义。M5310A_SOCK_UNKNOWN为的sock type初始值,在m5310a.c中定义。
-
HAL_SAL_Deinit
- 释放相关系统资源;
- 重置AT模组(可选)。
- 以m5310a模组为例,下面是m5310a模组的HAL_SAL_Deinit接口的实现片段:
static int HAL_SAL_Deinit(void)
{
if (!inited) {
return 0;
}
/* 释放锁、信号量等资源。 */
if (aos_mutex_is_valid(&g_link_mutex)) {
aos_mutex_free(&g_link_mutex);
}
// ...
return 0;
}-
HAL_SAL_Start
- 操作AT模组,建立Socket连接。对接时,如果有需要,注意维护文件描述符(FD)与模组连接号(link ID)或其他表示Socket连接的平台特征的映射关系。
- 注意,该接口需要等待socket连接成功(或出现错误)时返回,一般是在发出连接AT命令后,需要使用信号量方式,等待连接成功的事件通知(如果有)。
- 最少需要支持
TCP Client功能,可选的功能支持包括TCP Server、UDP单播、UDP多播、SSL Client。 - 以m5310a模组为例,下面是m5310a模组的HAL_SAL_Start接口的实现片段:
static int HAL_SAL_Start(sal_conn_t *conn)
{
// ...
/* 上层socket fd和AT层fd的转换 */
for (link_id = 0; link_id < LINK_ID_MAX; link_id++) {
if (g_link[link_id].fd >= 0) {
continue;
} else {
g_link[link_id].fd = conn->fd;
break;
}
}
// ...
/* 根据接口参数,设置AT层对应的连接协议和类型,支持TCP Client和UDP Unicast */
int protocol, port = conn->r_port;
char *type, *ip = conn->addr, *p;
switch (conn->type) {
case TCP_CLIENT:
protocol = 6;
type = "STREAM";
g_link[link_id].socktype = M5310A_SOCK_TCPCLIENT;
break;
case UDP_UNICAST:
protocol = 17;
type = "DGRAM";
g_link[link_id].socktype = M5310A_SOCK_UDPCLIENT;
break;
case SSL_CLIENT:
case TCP_SERVER:
case UDP_BROADCAST:
M5310A_LOGW(TAG, "Connection type %d not supported.", conn->type);
goto err;
default:
M5310A_LOGE(TAG, "%s %d invalid c->type %d\r\n", __func__, __LINE__, conn->type);
goto err;
}
/* 发送“AT+NSOCR”AT命令,创建socket */
snprintf(cmd, sizeof(cmd) - 1, "%s=%s,%d", M5310A_AT_CMD_SOCKET_CREATE, type, protocol);
M5310A_SEND_AT(cmd, rsp);
if (strstr(rsp, M5310A_AT_CMD_SUCCESS_RSP) == NULL) {
M5310A_LOGE(TAG, "%s %d failed rsp %s\r\n", __func__, __LINE__, rsp);
goto err;
}
/* 获取和存储AT层fd信息。 */
p = rsp;
while (*p > '9' || *p < '0') p++;
g_link[link_id].at_fd = *p - '0';
/* 对于UDP类型连接,无需connect,从这里返回。 */
if (protocol == 17) goto success;
/*
* Get socket connect lock so as to avoid 2 or more
* connect AT cmds entangled with each other.
*
* @note Be careful of deadlock.
*/
if (aos_mutex_lock(&g_connect_mutex, AOS_WAIT_FOREVER) != 0) {
M5310A_LOGE(TAG, "Failed to lock mutex (%s).", __func__);
goto err;
}
/* 对于TCP类型连接,执行“AT+NSOCO”AT命令,进行AT层connect操作。 */
memset(cmd, 0, sizeof(cmd));
memset(rsp, 0, sizeof(rsp));
snprintf(cmd, sizeof(cmd) - 1, "%s=%d,%s,%d",
M5310A_AT_CMD_SOCKET_CONNECT,
g_link[link_id].at_fd, ip, port);
M5310A_SEND_AT(cmd, rsp);
if (strstr(rsp, M5310A_AT_CMD_SUCCESS_RSP) == NULL) {
M5310A_LOGE(TAG, "%s %d failed rsp %s\r\n", __func__, __LINE__, rsp);
goto err;
}
/* 等待连接成功(或超时)后才能返回。 */
if (aos_sem_is_valid(&g_sem_connect)) {
if (aos_sem_wait(&g_sem_connect, SEM_WAIT_DURATION_MS) != 0) {
M5310A_LOGE(TAG, "Failed to wait sem %s %d", __func__, __LINE__);
aos_mutex_unlock(&g_connect_mutex);
goto err;
}
}
aos_mutex_unlock(&g_connect_mutex);
M5310A_LOGD(TAG, "%s sem_wait succeed.", __func__);
success:
aos_mutex_unlock(&g_link_mutex);
return 0;
err:
g_link[link_id].fd = -1;
g_link[link_id].at_fd = -1;
g_link[link_id].socktype = M5310A_SOCK_UNKNOWN;
aos_mutex_unlock(&g_link_mutex);
return -1;
}-
HAL_SAL_Close
- 操作AT模组,关闭Socket连接服务,释放link ID等资源(如果有需要)。该接口需要接收到socket关闭成功的通知(如果有)后才能返回。
- 以m5310a模组为例,下面是m5310a模组的HAL_SAL_Close接口的实现片段:
static int HAL_SAL_Close(int fd, int32_t remote_port)
{
// ...
/* AT层fd和上层fd转换 */
link_id = fd2linkid(fd);
if (link_id >= 0) {
/* 执行“AT+NSOCL”AT命令关闭连接。 */
at_fd = g_link[link_id].at_fd;
snprintf(cmd, sizeof(cmd) - 1, "%s=%u",
M5310A_AT_CMD_SOCKET_CLOSE, at_fd);
M5310A_SEND_AT(cmd, rsp);
if (strstr(rsp, M5310A_AT_CMD_SUCCESS_RSP) == NULL) {
M5310A_LOGE(TAG, "%s %d failed rsp %s\r\n", __func__, __LINE__, rsp);
return -1;
}
// ...
/* 重置g_link状态信息。 */
g_link[link_id].fd = -1;
g_link[link_id].fd = -1;
g_link[link_id].socktype = M5310A_SOCK_UNKNOWN;
// ...
}
return link_id < 0 ? -1 : 0;
}-
HAL_SAL_DomainToIp
- DNS解析服务,获取域名相关的服务器IP地址(返回类似
10.102.70.17这种IP地址字符串)。如果DNS结果嵌在reply_success_postfix之前返回,则驱动中需要解析命令回复字段解析到DNS结果;如果DNS结果以事件方式通知,则需要以事件方式处理和解析。 - 以m5310a模组为例,下面是m5310a模组的HAL_SAL_DomainToIp接口的实现片段:
- DNS解析服务,获取域名相关的服务器IP地址(返回类似
static int HAL_SAL_DomainToIp(char *domain, char ip[16])
{
// ...
/* 执行“AT+CMDNS”AT命令 */
snprintf(cmd, sizeof(cmd) - 1, "%s=\"%s\"",
M5310A_AT_CMD_DNS, domain);
M5310A_SEND_AT(cmd, rsp);
if (strstr(rsp, M5310A_AT_CMD_SUCCESS_RSP) == NULL) {
M5310A_LOGE(TAG, "%s %d failed rsp %s\r\n", __func__, __LINE__, rsp);
goto err;
}
/* 等待DNS结果(或超时)后再返回。 */
if (aos_sem_wait(&g_sem_dns, SEM_WAIT_DURATION_MS) != 0) {
M5310A_LOGE(TAG, "%s sem_wait failed", __func__);
goto err;
}
// ...
}-
HAL_SAL_Send
- 发送Socket数据。对接时,注意转换文件描述符FD到对应的Socket连接号,并通过相应的AT命令进行数据发送操作。注意,有些模组以hex格式发送数据,而有些模组以hexstring格式发送,注意转换。
- 注意:需要保存HAL_SAL_Start接口传入的参数信息,用以判断是否UDP协议及远端IP、端口的值,不能使用本接口中的remote_ip等参数。
- 以m5310a模组为例,下面是m5310a模组的HAL_SAL_Send接口的实现片段:
static int HAL_SAL_Send(int fd,
uint8_t *data,
uint32_t len,
char remote_ip[16],
int32_t remote_port,
int32_t timeout)
{
// ...
/* 上层fd映射诚link_id和AT fd。 */
link_id = fd2linkid(fd);
atfd = g_link[link_id].at_fd;
/* 根据g_link中保存的信息判断是TCP还是UDP发送。 */
if (g_link[link_id].socktype == M5310A_SOCK_UDPCLIENT) { /* UDP send */
/* 使用“AT+NSOST”AT命令进行UDP数据发送 */
snprintf(cmd, cmdlen - 1, "%s=%d,%s,%d,%d,", M5310A_AT_CMD_UDP_SEND,
atfd, g_link[link_id].remote_ip, g_link[link_id].remote_port, len);
hex2hexstr(cmd + strlen(cmd), data, len);
/* This is a trick, anyway it works. */
snprintf(cmd + strlen(cmd), 1, "%s", "\n");
M5310A_SEND_AT_NO_REPLY(cmd, false);
} else if (g_link[link_id].socktype == M5310A_SOCK_TCPCLIENT) { /* TCP send */
/* 使用“AT+NSOSD”AT命令进行UTCP数据发送 */
snprintf(cmd, cmdlen - 1, "%s=%d,%d,", M5310A_AT_CMD_TCP_SEND, atfd, len);
hex2hexstr(cmd + strlen(cmd), data, len);
M5310A_SEND_AT(cmd, rsp);
// ...
} else {
/* TODO */
}
// ...
}-
HAL_SAL_RegisterNetconnDataInputCb
- 注册数据接收回调函数。该回调函数需要在AT层接收到socket数据时被调用。具体调用方式请参考示例驱动代码。
- 以m5310a模组为例,下面是m5310a模组的HAL_SAL_RegisterNetconnDataInputCb接口的实现片段:
/* 此处注册回调 */
static int HAL_SAL_RegisterNetconnDataInputCb(netconn_data_input_cb_t cb)
{
if (cb) {
/* 通过全局变量g_netconn_data_input_cb保存回调函数指针。 */
g_netconn_data_input_cb = cb;
}
return 0;
}
/* 在接收处理函数中,调用回调上报数据 */
static void m5310a_socket_data2_event_handler(void *arg, char *buf, int buflen)
{
// ...
/* We use static mm skt_recv_buffer here to avoid frequent mm alloc */
while (left > 0) {
// ...
/* 调用回调函数进行数据通知 */
if (g_netconn_data_input_cb) {
/* TODO get recv data src ip and port*/
if (g_netconn_data_input_cb(fd, skt_recv_buffer, toread, NULL, 0)) {
M5310A_LOGE(TAG, " %s socket %d get data len %d fail to post"
" to sal, drop it\n", __func__, fd, toread);
}
}
// ...
}
}在进行新模组驱动HAL对接时,可以参考AliOS Things源码中提供的示例模组驱动代码,结合上述介绍,完成驱动HAL接口的实现和对接。
在对接HAL的过程中,对AT模组的收发操作,建议借助atparser模块进行。atparser模块是AliOS Things中为方便AT命令的收发处理,抽象的一套AT处理机制。atparser提供一个统一的线程进行串口AT数据的接收,对于AT数据的发送,atparser提供了发送接口,用户可以异步进行发送,由atparser的接收线程负责接收并将AT回复反馈给对应发送者。同时atparser提供了一套事件处理机制。
借助atparser,驱动对接用户不需要太关注AT通道的底层收发操作,而专注在自身模组的AT命令处理上。
如果驱动的实现依赖atparser组件,请修改模组驱动的Makefile文件,添加atparser的组件依赖。m5310a完整的makefile示例如下:
NAME := device_sal_m5310a
$(NAME)_MBINS_TYPE := kernel
$(NAME)_VERSION := 1.0.0
$(NAME)_SUMMARY := sal hal implmentation for m5310a
GLOBAL_DEFINES += DEV_SAL_M5310A
$(NAME)_COMPONENTS += atparser # 添加对atparser组件的依赖
$(NAME)_SOURCES += m5310a.c
GLOBAL_INCLUDES += ./ # 添加头文件暴露,使外部可以引用atcmd_config_module.h头文件以下是atparser模块的用户接口和相关定义介绍(请参考include/network/nal/atparser/atparser.h文件)。用户可以参考其他示例驱动对atparser接口的使用,结合本文的介绍,使用atparser进行驱动实现。
- at_dev_type_t
AT设备类型定义,目前仅支持UART。如有需要,用户可以添加其他类型设备(如SPI)。
- at_reply_config_t
AT命令回复的特征配置,请使用atcmd_config_module.h文件中提供的定义进行填充。包括:reply_prefix,回复字串前缀(如有,一般为换行和回车“\r\n”);reply_success_postfix,成功时的回复后缀(一般为“OK\r\n”);reply_fail_postfix,失败时的回复后缀(一般为“ERROR\r\n”)。
- at_config_t
AT相关的配置,包括串口号、设备类型、设备配置参数(如串口波特率、校验位等)、AT命令回复特征、发送分隔符、AT命令发送超时、发送配置、接收线程配置等。
typedef struct {
uint8_t port; /* dev port. Compulsory */
at_dev_type_t type; /* dev type. Compulsory */
void *dev_cfg; /* dev config. Compulsory. For UART, see uart_config_t in hal/uart.h */
at_reply_config_t reply_cfg; /* AT receive prefix and postfix. Compulsory. */
char *send_delimiter; /* AT sending delimiter between command and data. Optional, "\r" */
uint32_t timeout_ms; /* AT send or receive timeout in millisecond. Optional, 1000 ms by defaut */
uint8_t send_wait_prompt; /* whether AT send waits prompt before sending data. Optional, 0 by default */
uint32_t prompt_timeout_ms; /* AT send wait prompt timeout in millisecond. Optional, 200 ms by default */
uint8_t send_data_no_wait; /* whether AT send waits response after sending data. Optional, 0 by default */
int recv_task_priority; /* AT recv task priority. Optional, 32 by default*/
int recv_task_stacksize; /* AT recv task stacksize. Optional, 1K by default */
} at_config_t;- at_recv_cb
接口描述:AT事件回调处理函数原型定义。
参数含义:arg - 注册回调时传入的arg参数;buf - 注册回调时传入的recvbuf参数,用于存储有prefix和postfix特征匹配的结果;buflen - buf中接收到的内容的实际长度。
返回值:空。
- at_init
接口描述:初始化atparser核心功能,在HAL对接中add_dev接口开始处调用。
参数含义:无。
返回值:0:成功,-1:失败。
- at_deinit
接口描述:销毁atparser模块(注销AT设备等操作),驱动中一般不调用。
参数含义:arg - 注册回调时传入的arg参数;buf - 注册回调时传入的recvbuf参数,用于存储有prefix和postfix特征匹配的结果;buflen - buf中接收到的内容的实际长度。
返回值:0:成功,-1:失败。
- at_add_dev
接口描述:添加AT设备,在HAL对接中add_dev接口中调用。
参数含义:config - 设备相关的配置。
返回值:大于等于0:设备句柄,-1:添加失败。
- at_delete_dev
接口描述:删除AT设备。一般驱动不用调用。
参数含义:AT设备的句柄。
返回值:0:成功,-1:失败。
- at_send_wait_reply
接口描述:发送AT命令及数据,并等待回复。该函数阻塞,直到接收到该AT命令的回复,或者发送等待超时(默认是5s,用户可配置)。
参数含义:fd - AT设备句柄;cmd - 需要发送的AT命令字符串;cmdlen - AT命令长度;delimiter - 发送AT命令与数据时二者之间的分隔符(如果不适用,请填充为NULL);data - 需要发送的数据内容;datalen - 数据长度;replybuf - 回复结果接收缓存;bufsize - 接收缓存的长度;atcmdconfig - AT命令回复的特征配置。
返回值:0:成功,-1:失败。
注意:(1)命令的回复中有reply_success_postfix(或reply_fail_postfix)特征,才能调用此函数进行发送;(2)发送AT命令后,reply_success_postfix(或reply_fail_postfix)及之前的串口数据会被认定为AT命令的回复。如果你的模组在reply_success_postfix(或reply_fail_postfix)还有内容回复,一般建议当作AT事件处理(在Init中注册相应的回调函数进行处理)。
- at_send_no_reply
接口描述:发送AT命令及数据,无需等待回复。该函数非阻塞,发送到设备缓冲区即返回。
参数含义:fd - AT设备句柄;data - 需要发送的命令或数据;datalen - 命令或数据长度;delimiter - 是否发送分隔符(at_config_t结构体中定义的send_delimiter)。
返回值:0:成功,-1:失败。
注意:该函数一般在命令或数据发送后没有回复的情况下调用。对于有回复、但是回复中不带reply_success_postfix(或reply_fail_postfix)特征的命令和数据发送,一般也需要调用此函数进行发送,并注册相应的事件回调函数对回复进行处理。
- at_read
接口描述:读取AT设备。
参数含义:fd - AT设备句柄;outbuf - 结果缓存;readsize - 缓存大小。
返回值:-1:读取失败,>0:读取到的字节长度。
- at_register_callback
接口描述:注册AT事件回调处理函数。一般不在AT命令回复特征段内的数据,都需要按照事件进行处理,如网络连接成功通知、Socket数据到达通知等事件。
参数含义:fd - AT设备句柄;prefix - 事件前缀标记,必选项,如m5310a模组的Socket数据通知事件“+NSONMI”、mk3060模组的WiFi事件通知“+WEVENT”等;postfix - 事件后缀标记,可选项,如果不使用,请填充为NULL;recvbuf - 匹配同时有prefix和postfix特征的回复时的结果缓存区,可选项,如果不适用请填充为NULL;bufsize - recvbuf缓存区大小,如果recvbuf为NULL时该参数填充为0;cb - 事件回调处理函数,必选项;arg - 提供给事件回调处理函数的参数,可选项,如果没有请填充为NULL。
返回值:0:成功,-1:失败。
以下是在进行HAL对接的过程中,需要特别注意的一些事项:
- AT事件的认定和处理
一般位于命令发送和reply_success_postfix(一般是“OK\r\n”)或reply_fail_postfix(一般是“ERROR\r\n”)字段之间的内容,认定为命令的回复;而位于reply_success_postfix(或reply_fail_postfix)之后的内容,需要以事件方式进行处理。对于某些模组,事件可能不是“+XXX“的形式出现,这种情况很容易被误解为不是事件,如m5310a模组的网络连接事件“CONNECT OK”,建议当作事件进行处理。
- 在事件处理中不能调用at_send_wait_reply接口
因为事件处理函数是在atparser接收线程上下文中,这时调用at_send_wait_reply需要等待atparser接收线程处理命令的返回,会造成atparser接收线程线程卡死。
- UART缓存大小的问题说明
在使用串口设备外接AT模组时,需要注意设置合适的串口接收缓存(如ringbuf)的大小。如果缓存太小,在接受较大的串口数据时容易溢出/新覆盖旧数据的问题,影响AT结果的解析。
- AT命令发送超时等待设置
默认AT命令发出后,回复(如果有)应该在5秒内返回,一般命令的回复都可以在5秒内返回。如果该模组有某些AT命令需要等到较长时间,则需要注意加大AT等待命令回复的timeout时间(文件network/nal/atparser/atparser_opts.h中的AT_TASK_DEFAULT_WAIT_TIME_MS宏配置),或者避免使用at_send_wait_reply进行这种命令的回复等待。例如,m5310a模组的 “AT+NRB”。
- HAL_SAL_Send接口实现时UDP类型的判定
不能依靠remote_port/remote_ip参数是否有效来来判断是TCP还是UDP,只能依赖fd。可以在socket建立时,驱动可以记录该连接的类型(TCP还是UDP),然后在socket发送/接收时使用该记录进行类型判断。
- 调用sal_ad_dev添加串口设备的问题
参数中的name需与驱动名(一般也是模组名)相匹配,config除port和timeout外,其他字段的值需要使用hal/uart.h中的宏定义,需添加atcmd_config_module.h头文件引用。
- HAL_SAL_Send接口中UDP远端IP和端口的问题
remote_ip、remote_port参数针对UDP client无效,对接时需注意,远端ip/port参数需要从HAL_SAL_Start接口中自己保存,并在发送时查询使用。
- AT命令结束符的差异处理
例如,大部分AT命令以"\r\n"结尾,但可能存在少数以"\n"结尾(如m5310a的AT+NSOST)的命令。如果选择了以“\r\n”为通用的命令结尾符,则需要对以“\n”结束的AT命令进行特别操作。
- 修改driver/sal目录下该模组类型目录下的Config.in文件(以m5310a为例,应修改drivers/sal/nbiot/Config.in文件)。根据已有示例添加该模组相关的行(即以下示例中m5310a所在的行)。
config AOS_SAL_NBIOT
bool "NBIOT"
if AOS_SAL_NBIOT
choice
prompt "Device"
default AOS_COMP_DEVICE_SAL_M5310A if BSP_EXTERNAL_NBIOT_MODULE = "nbiot.m5310a"
config AOS_NBIOT_NULL
bool "Null"
source "drivers/sal/nbiot/m5310a/Config.in"
endchoice
endif- 修改driver/Config.in文件,添加模组类型的支持(参考下列diff文件的修改,如果是在已有类型上添加模组,则该步骤可以省略)。
diff --git a/drivers/Config.in b/drivers/Config.in
index 0f6c3a3..a21a7c4 100644
--- a/drivers/Config.in
+++ b/drivers/Config.in
@@ -7,10 +7,12 @@ choice
prompt "SAL Drivers Configuration"
default AOS_SAL_WIFI if BSP_EXTERNAL_WIFI_MODULE != ""
default AOS_SAL_LTE if BSP_EXTERNAL_LTE_MODULE != ""
+ default AOS_SAL_NBIOT if BSP_EXTERNAL_NBIOT_MODULE != ""
source "drivers/sal/wifi/Config.in"
source "drivers/sal/gprs/Config.in"
source "drivers/sal/lte/Config.in"
+ source "drivers/sal/nbiot/Config.in"
endchoice
endif
- 在SAL Core中增加模组的设备初始化函数调用。参考以下修改:
diff --git a/network/nal/sal/src/sal_sockets.c b/network/nal/sal/src/sal_sockets.c
index 4c0f220..5f94213 100644
--- a/network/nal/sal/src/sal_sockets.c
+++ b/network/nal/sal/src/sal_sockets.c
@@ -1621,6 +1621,13 @@ int sal_module_register(sal_op_t *module)
int sal_device_init()
{
int ret = 0;
+#ifdef DEV_SAL_M5310A
+ if(m5310a_sal_device_init() != 0)
+ {
+ SAL_ERROR("m5310a sal init failed\n");
+ return -1;
+ }
+#endif
#ifdef DEV_SAL_BK7231
if(bk7231_sal_device_init() != 0)
{备注:由于m5310a模组支持的OOB事件超过我们3.0版本AT目前支持的个数(默认是5),因此跑m5310a模组时还要修改AT OOB的个数限制(后续版本会同步更新,不用手动修改)。参考下列修改:
diff --git a/network/nal/atparser/atparser_internal.h b/network/nal/atparser/atparser_internal.h
index 31dc215..df100cd 100644
--- a/network/nal/atparser/atparser_internal.h
+++ b/network/nal/atparser/atparser_internal.h
@@ -9,7 +9,7 @@
#include "atparser_opts.h"
-#define OOB_MAX 5
+#define OOB_MAX 10
typedef enum {
AT_RSP_WAITPROMPT = 0,- 将新对接模组加入SAL设备组件编译列表,修改
network/nal/sal/aos.mk文件,m5310a的示例如下:
diff --git a/network/nal/sal/aos.mk b/network/nal/sal/aos.mk
index 1f5ce93..fa44fbf 100644
--- a/network/nal/sal/aos.mk
+++ b/network/nal/sal/aos.mk
@@ -27,4 +27,6 @@ else ifeq (wifi.esp8266,$(module))
$(NAME)_COMPONENTS += device_sal_esp8266
else ifeq (wifi.athost,$(module))
$(NAME)_COMPONENTS += device_sal_athost
+else ifeq (nbiot.m5310a,$(module))
+$(NAME)_COMPONENTS += device_sal_m5310a
endif- 修改MCU侧board的makefile文件,增加新对接模组的支持。以下以stm32f103rb-nucleo为例:
diff --git a/board/stm32f103rb-nucleo/aos.mk b/board/stm32f103rb-nucleo/aos.mk
index 2858ece..e8e8d5e 100644
--- a/board/stm32f103rb-nucleo/aos.mk
+++ b/board/stm32f103rb-nucleo/aos.mk
@@ -23,7 +23,12 @@ ywss_support ?= 0
GLOBAL_DEFINES += CONFIG_NO_TCPIP
#depends on sal module if select sal function via build option "AOS_NETWORK_SAL=y"
-AOS_NETWORK_SAL ?= n
+AOS_NETWORK_SAL ?= y
+ifeq (y,$(AOS_NETWORK_SAL))
+$(NAME)_COMPONENTS += sal netmgr
+module ?= nbiot.m5310a
+else
+GLOBAL_DEFINES += CONFIG_NO_TCPIP
+endif
+
ifeq ($(COMPILER), armcc)
$(NAME)_SOURCES += startup/startup_stm32f103xb_keil.s备注:对于已对接过SAL模组的board(例如developerkit),其makefile中已有SAL相关的支持,只需求修改module那一行即可。
- 修改MCU侧board的menuconfig配置文件,增加对新对接模组的支持。以下以stm32f103rb-nucleo为例:
diff --git a/board/stm32f103rb-nucleo/Config.in b/board/stm32f103rb-nucleo/Config.in
index 2ff9918..ff8f919 100644
--- a/board/stm32f103rb-nucleo/Config.in
+++ b/board/stm32f103rb-nucleo/Config.in
@@ -3,10 +3,20 @@ config AOS_BOARD_STM32F103RB_NUCLEO
select AOS_MCU_STM32F1XX
select AOS_COMP_KERNEL_INIT
select AOS_COMP_OSAL_AOS
+ select AOS_COMP_SAL if AOS_NETWORK_SAL
help
**The Stm32f103rb-nucleo** performance line microcontroller incorporates the high-performance ARM® Cortex™-M3 32-bit RISC core operating at a 72 MHz frequency, high-speed embedded memories, and an extensive range of enhanced I/Os and peripherals connected to two APB buses. The STM32F103RC offers three 12-bit ADCs, four general-purpose 16- bit timers plus two PWM timers, as well as standard and advanced communication interfaces: up to two I2Cs, three SPIs, two I2Ss, one SDIO, five USARTs, an USB and a CAN.
if AOS_BOARD_STM32F103RB_NUCLEO
# Configurations for board stm32f103rb-nucleo
+config BSP_SUPPORT_EXTERNAL_MODULE
+ bool
+ default y
+
+config BSP_EXTERNAL_NBIOT_MODULE
+ string
+ depends on BSP_SUPPORT_EXTERNAL_MODULE
+ default "nbiot.m5310a"
+
endif备注:对于已对接过SAL模组的board(例如developerkit),其menuconfig配置文件中已有SAL相关的支持,只需求修改模组类型和模组名信息相关的行即可,参考以下修改:
diff --git a/board/developerkit/Config.in b/board/developerkit/Config.in
index d38c1ad..9fd4689 100644
--- a/board/developerkit/Config.in
+++ b/board/developerkit/Config.in
@@ -62,9 +62,9 @@ config BSP_SUPPORT_EXTERNAL_MODULE
bool
default y
-config BSP_EXTERNAL_WIFI_MODULE
+config BSP_EXTERNAL_NBIOT_MODULE
string
depends on BSP_SUPPORT_EXTERNAL_MODULE
- default "wifi.bk7231"
+ default "nbiot.m5310a"
endif本章以在stm32f103rb-nucleo(MCU侧)使用m5310a外挂模组为例,展示如何使用和测试新对接模组的SAL驱动。其他MCU板子和模组的使用步骤类似。
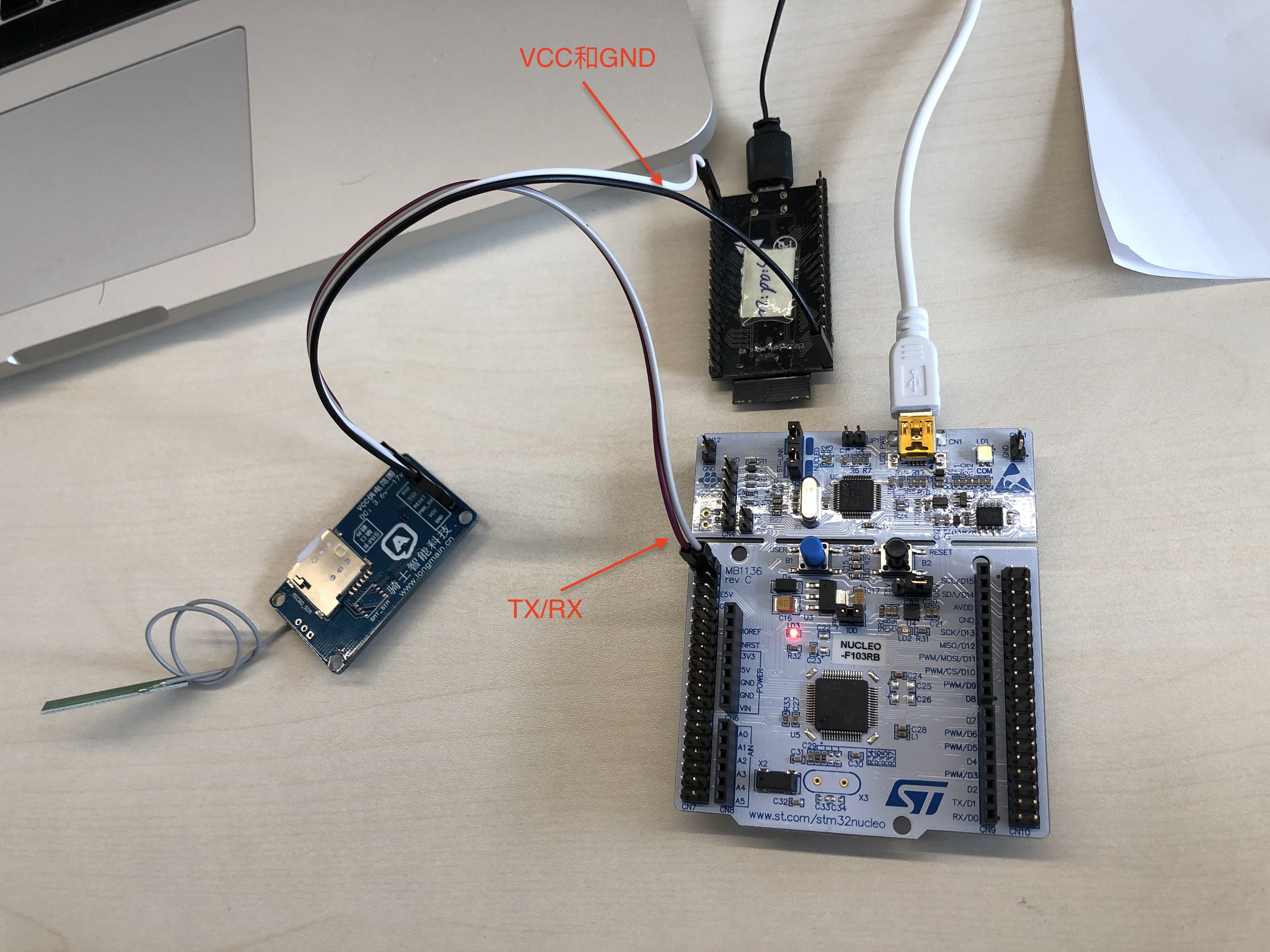
本文的介绍基于stm32f103rb-nucleo(MCU) + m5310a(NBIoT模组),请参考下列步骤准备好硬件环境:
- 通过杜邦线给m5310a的供电(参考下图)。备注:可以通过MCU侧的5V和GND给m5310a供电,但是建议通过独立电源给m5310a供电,因为m5310a的启动和初始化需要较长时间。
- 通过杜邦线连接MCU和模组的AT串口收发信号线(RX/TX交叉连接,参考下图)。
- 通过USB线给MCU供电(参考下图)。
用户可以使用本章最后附件中的测试用例(app/example/sal_simple_test),也可以自己开发一个使用外挂模组进行socket通信的测试用例。
请参考以下步骤,将测试用例添加到AliOS Things工程中。
- 集成测试用例。修改app/example/Config.in,增加测试用例的入口。
diff --git a/app/example/Config.in b/app/example/Config.in
index 7176dc5..0e5c96e 100644
--- a/app/example/Config.in
+++ b/app/example/Config.in
@@ -252,5 +252,11 @@ if AOS_APP_UAPP2
default "uapp2"
endif
+source "app/example/sal_simple_test/Config.in"
+if AOS_APP_SAL_SIMPLE_TEST
+ config AOS_BUILD_APP
+ default "sal_simple_test"
+endif
+
endchoice
endif如果使用附件中的测试用例,则该步骤可省略。
如果使用自己开发的用例,则需要在app中完成模组设备的添加操作。请参考以下代码对模组设备进行添加操作(其中串口号是指MCU board用于外挂模组的串口号,参考下一章节中board相关的配置):
/**
* MCU board‘s AT uart port number:
* - 1
* @note subject to change according to your case.
*
* module uart config:
* - 9600
* - 8n1
* - no flow control
* - tx/rx mode
* @note These configs are subject to change according to the module you use.
*/
data.uart_dev.port = 1;
data.uart_dev.config.baud_rate = 9600;
data.uart_dev.config.data_width = DATA_WIDTH_8BIT;
data.uart_dev.config.parity = NO_PARITY;
data.uart_dev.config.stop_bits = STOP_BITS_1;
data.uart_dev.config.flow_control = FLOW_CONTROL_DISABLED;
data.uart_dev.config.mode = MODE_TX_RX;
/**
* Register and Initialize SAL device.
*
* Attention:
* (1) If register SAL device using "sal_add_dev(NULL, NULL)",
* it means to use the device and related configuration
* prodived in board settings (e.g. module ?= wifi.bk7231
* in board/developer/aos.mk).
* (2) If want to register SAL device with specific parameters,
* Please use 'sal_add_dev("<device_name>", "<dev_para>")',
* in which the <device_name> is the module name of the AT device,
* and fill in the <dev_para> with UART config parameters.
*/
if (sal_add_dev("m5310a", &data) != 0) {
LOG("Failed to add SAL device!");
return -1;
}MCU board为了支持外挂模组通信,需要指定串口设备号,并对串口进行相应的初始化。以下以stm32f103rb-nucleo为例进行说明和示例:
- 在board目录下添加AT串口设置文件atcmd_config_platform.h,在该文件中通过AT_UART_PORT宏指定AT串口设备号(这里使用串口号1,对应USART3)。
/*
* Copyright (C) 2015-2017 Alibaba Group Holding Limited
*/
#ifndef _ATCMD_CONFIG_PLATFORM_H_
#define _ATCMD_CONFIG_PLATFORM_H_
// AT uart
#define AT_UART_PORT 1
#endif- 修改board相关源码,对串口1进行初始化设置。
diff --git a/board/stm32f103rb-nucleo/config/board.h b/board/stm32f103rb-nucleo/config/board.h
index 650d217..a524ea8 100644
--- a/board/stm32f103rb-nucleo/config/board.h
+++ b/board/stm32f103rb-nucleo/config/board.h
@@ -61,6 +61,7 @@ extern "C" {
typedef enum{
PORT_UART_STD,
+ PORT_UART_AT,
PORT_UART_SIZE,
PORT_UART_INVALID = 255,
}PORT_UART_TYPE;
@@ -86,6 +87,10 @@ void Error_Handler(void);
#define USART_TX_GPIO_Port GPIOA
#define USART_RX_Pin GPIO_PIN_3
#define USART_RX_GPIO_Port GPIOA
+#define USART3_TX_Pin GPIO_PIN_10
+#define USART3_TX_GPIO_Port GPIOC
+#define USART3_RX_Pin GPIO_PIN_11
+#define USART3_RX_GPIO_Port GPIOC
#define LD2_Pin GPIO_PIN_5
#define LD2_GPIO_Port GPIOA
#define TMS_Pin GPIO_PIN_13
diff --git a/board/stm32f103rb-nucleo/startup/board.c b/board/stm32f103rb-nucleo/startup/board.c
index f942425..51b17c8 100644
--- a/board/stm32f103rb-nucleo/startup/board.c
+++ b/board/stm32f103rb-nucleo/startup/board.c
@@ -46,7 +46,8 @@ DMA_HandleTypeDef hdma_usart2_tx;
DMA_HandleTypeDef hdma_usart2_rx;
UART_MAPPING UART_MAPPING_TABLE[] =
{
- {PORT_UART_STD, USART2, {UART_OVERSAMPLING_16, 64}}
+ {PORT_UART_STD, USART2, {UART_OVERSAMPLING_16, 64}},
+ {PORT_UART_AT, USART3, {UART_OVERSAMPLING_16, 256}},
};
static void stduart_init(void)
diff --git a/board/stm32f103rb-nucleo/drivers/stm32f1xx_hal_msp.c b/board/stm32f103rb-nucleo/drivers/stm32f1xx_hal_msp.c
index fb1a916..8e856be 100644
--- a/board/stm32f103rb-nucleo/drivers/stm32f1xx_hal_msp.c
+++ b/board/stm32f103rb-nucleo/drivers/stm32f1xx_hal_msp.c
@@ -171,6 +171,77 @@ void HAL_UART_MspInit(UART_HandleTypeDef* huart)
/* USER CODE BEGIN USART2_MspInit 1 */
/* USER CODE END USART2_MspInit 1 */
+ } else if (huart->Instance == USART3) {
+ /* USER CODE BEGIN USART3_MspInit 0 */
+
+ /* USER CODE END USART3_MspInit 0 */
+ /* Peripheral clock enable */
+ __HAL_RCC_USART3_CLK_ENABLE();
+
+ __HAL_RCC_GPIOC_CLK_ENABLE();
+ /**USART3 GPIO Configuration
+ PC10 ------> USART3_TX
+ PC11 ------> USART3_RX
+ */
+
+#ifdef STM32F103_ENABLE_UART_DMA
+ GPIO_InitStruct.Pin = USART3_TX_Pin|USART3_RX_Pin;
+ GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
+ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
+ HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
+
+ /* USART3 DMA Init */
+ /* USART3_TX Init */
+ hdma_usart3_tx.Instance = DMA1_Channel5;
+ hdma_usart3_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
+ hdma_usart3_tx.Init.PeriphInc = DMA_PINC_DISABLE;
+ hdma_usart3_tx.Init.MemInc = DMA_MINC_ENABLE;
+ hdma_usart3_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
+ hdma_usart3_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
+ hdma_usart3_tx.Init.Mode = DMA_NORMAL;
+ hdma_usart3_tx.Init.Priority = DMA_PRIORITY_LOW;
+ if (HAL_DMA_Init(&hdma_usart3_tx) != HAL_OK)
+ {
+ Error_Handler();
+ }
+
+ __HAL_LINKDMA(huart,hdmatx,hdma_usart2_tx);
+
+ /* USART3_RX Init */
+ hdma_usart3_rx.Instance = DMA1_Channel4;
+ hdma_usart3_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
+ hdma_usart3_rx.Init.PeriphInc = DMA_PINC_DISABLE;
+ hdma_usart3_rx.Init.MemInc = DMA_MINC_ENABLE;
+ hdma_usart3_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
+ hdma_usart3_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
+ hdma_usart3_rx.Init.Mode = DMA_NORMAL;
+ hdma_usart3_rx.Init.Priority = DMA_PRIORITY_LOW;
+ if (HAL_DMA_Init(&hdma_usart3_rx) != HAL_OK)
+ {
+ Error_Handler();
+ }
+
+ __HAL_LINKDMA(huart,hdmarx,hdma_usart3_rx);
+#else /* STM32F103_ENABLE_UART_DMA */
+ GPIO_InitStruct.Pin = GPIO_PIN_10;
+ GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
+ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
+ HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
+
+ GPIO_InitStruct.Pin = GPIO_PIN_11;
+ GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
+ GPIO_InitStruct.Pull = GPIO_NOPULL;
+ HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
+
+ __HAL_AFIO_REMAP_USART3_PARTIAL();
+#endif /* STM32F103_ENABLE_UART_DMA */
+
+ /* USART3 interrupt Init */
+ HAL_NVIC_SetPriority(USART3_IRQn, 0, 0);
+ HAL_NVIC_EnableIRQ(USART3_IRQn);
+ /* USER CODE BEGIN USART3_MspInit 1 */
+
+ /* USER CODE END USART3_MspInit 1 */
}
}- menuconfig配置
$ aos make distclean
$ aos make sal_simple_test@stm32f103rb-nucleo -c config
$ aos make menuconfig # 可选- 编译固件
$ aos make clean; aos make编译好的固件位于out/sal_simple_test@stm32f103rb-nucleo/binary/目录下。
- 烧录并运行固件
sal_simple_test测试用例将测试TCP和UDP功能,请注意测试日志输出。
用户可以通过以下命令生成Keil或IAR工程文件,然后就可以通过Keil或IAR工具进行工程的编译和调试了。
- 导出Keil工程
可以通过以下命令生成Keil工程,工程文件位于projects/Keil/sal_simple_test@stm32f103rb-nucleo/keil_project/目录下。
$ aos make export-keil # 生成Keil工程文件- 导出IAR工程
可以通过以下命令生成IAR工程,工程文件位于projects/IAR/sal_simple_test@stm32f103rb-nucleo/iar_project/目录下。
$ aos make export-iar # 生成IAR工程文件本文是AliOS Things 3.0 AT模组驱动一站式开发文档,涵盖了代码获取、驱动对接、驱动集成和验证等环节的详细步骤和示例。通过本文档,用户可以实现从零开始实现AT模组的对接和使用。
